This cruise (onboard the RV G.O. Sars, 30.03.2023 to 12.04.2023 - 13 Days long starting and ending in Bergen, Norway) was focussed on surveying the coastal belt east of “Utsira Nord” (Utsira KB) and the two multibeam mapped areas close to “Sørlige Nordsjø II” (NSJ-1 and NSJ-2). These areas are of interest due to their proximity to the named offshore wind license areas and due to their overlap with “særlig verdiful områder” (SVO) which are areas of particular scientific and management interest.
The MAREANO baseline mapping method was applied, but this cruise was focussed upon completing the video lines in these areas, and testing the munin+ AUV for data uses and the integration of AUVs into the Mareano method. In addition, the Oil Directorate asked for 2 gravity cores from areas with suspected natural oil leakage, and limited physical sampling equipment was taken for contingency use.
One hundred and twenty reference stations were visited including completing 112 (225m long) video lines, along with 5 AUV missions (collecting EM2040, HISAS2040, SBP, CT, photo data). Furthermore, 8 CTDs, 5 Boxcores, 4 Multicores, 2 stations with grabs for checking if the gravity corer can be used (no proposed site had suitable substrate for gravity coring), and 2 stations with 5 replicate grabs each for biology/geology were completed. Topaz subbottom profiling (SBP) data was collected along and between video lines and all gravity corer proposed sites, with additional water column multibeam echosounder (EM302) data also collected over all the proposed gravity corer sites. Note that 3 video lines, 1 AUV mission and 2 CTD sites were within the fjords near stavanger (during poor weather) in areas where FOH granted declassificaiton for AUV activities.
1 - Abbreviations
The following Abbreviations are use throughout this report:
AUV: Autonomous Underwater Vehicle – here it is the Kongsberg Munin +.
CT: Conductivity and Temperature (but not Depth as is normal) – the AUV CT sensor does not collect pressure information that is converted into depth as standard, but it does have an altimeter/depth sensor as part of that navigation system so this data is also available.
CTD: Conductivity, Temperature and Depth sampling rosette
GC1, GC2, etc: Gravity Corer station where there had been requests from the Oil directorate to take gravity corer samples if possible. No sites had suitable sediment to take these samples in the end but the sites are still locations where sampling took place so are logged here.
HI:HavforskningsInstituttet or the Institute of Marine Research as it is called in English.
MBE:MultiBeam Echosounder
NGU:Norsk Geologiske Undersøkelse or the Norwegian Geological Survey as it is called in English.
NSJ-1; NSJ-2:Nord Sjø mapping areas, ames assigned by Mareano but often informed by industry mapping names such as the Sørlige Nordsjø II area which is the official name assigned to an offshore wind licensing area.
SVO: Særlig Verdiful Område – translates to “Especially Valuable Area” and is a Norwegian management region that currently has no protection measures but indicates an area of particular ecological value.
Utsira KB: The Ustira Kyst Belt – another Mareano mapping area name. Utsira is an island in the area and Norway’s smallest municipality.
2 - Aims
Apply Mareano method, generally following the 30 stations/1000 km2 rule (for SVO/very variable environments), with a focus on Video sampling (using the Chimera towed camera rig).
ACHIEVED
Test AUV (Munin +) for data uses and integration into the Mareano method.
ACHIEVED
Take 2 x gravity cores at the request of the Oil Directorate in areas with possible natural oil seepages.
CHECKED SITES WITH TOPAZ AND GRABS, NONE SUITED TO GRAVITY CORERS/ SHOWING CLEAR EVIDENCE OF OIL SEEPS, ADVISE RETURNING WITH VIBROCORER
When there are issues with Chimera/AUV take Boxcores, Multicores, Grabs (in that order) at proposed full stations to reduce the load on the summer cruise.
SOME SAMPLES TAKEN AT FULL STATIONS (DETAILS FOLLOW)
3 - Areas
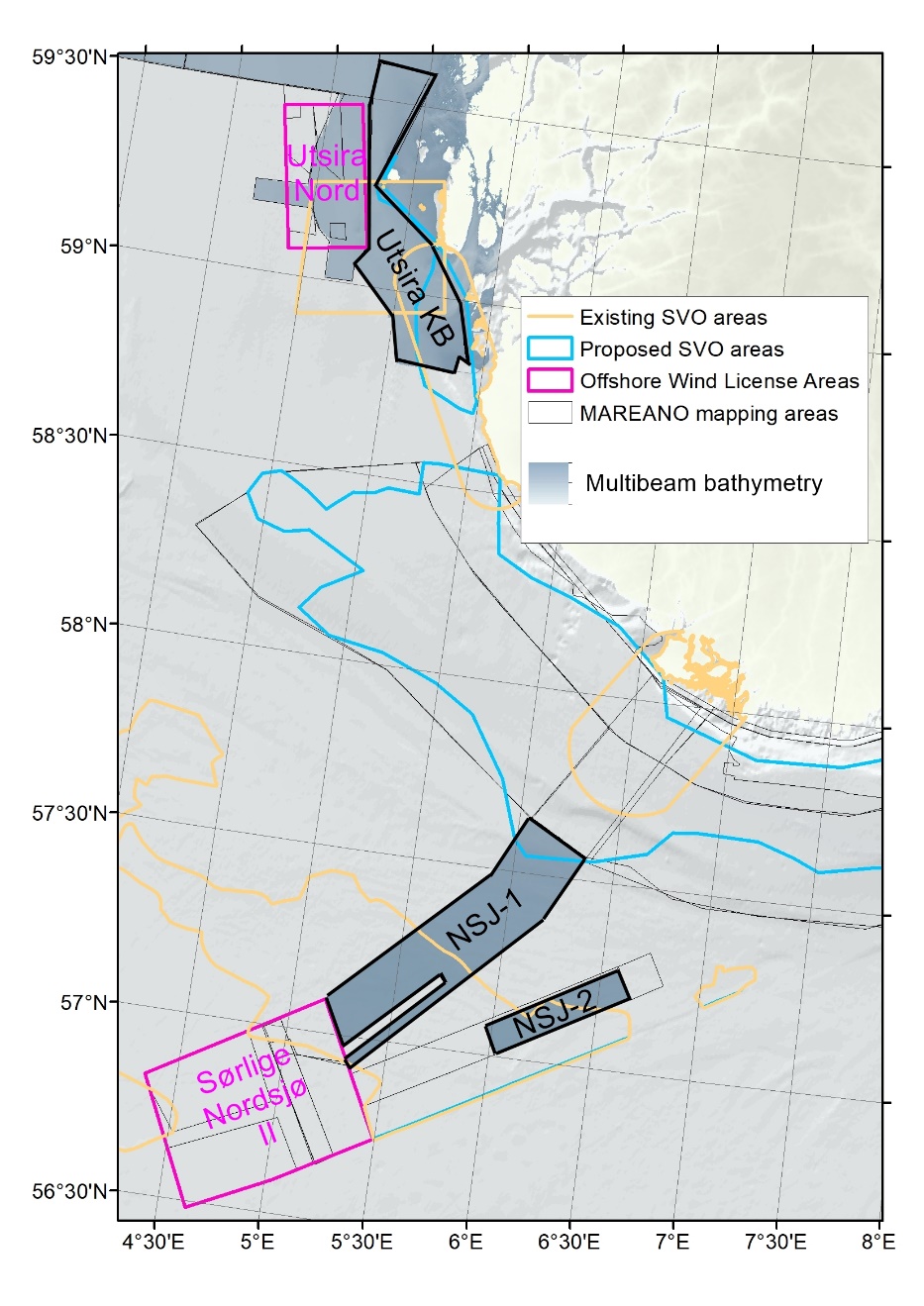
Figure 1 Cruise focus areas (Utsira KB, NSJ-1, NSJ-2) with reference to nearby offshore wind licence areas and proposed and existing SVO
This cruise was focussed on:
Utsira KB = The coastal belt east of Utsira Nord offshore wind license area (including within the Kystebelt SVO), and
NSJ-1 and NSJ-2 areas = Multibeam mapped areas which sit alongside the Sorlig Nordsjo II offshore wind license area and overlap with the Tobis SVO and a small corner of the Norskerenna proposed SVO.
A small amount of additional sampling was performed in Fognafjorden (one of three sites in the fjords around Stavanger where we had applied for, and received, permission from FOH for declassification of the seabed) as a bad weather retreat area where AUV testing could continue while waiting for improved conditions. A CTD was also taken at a second site closer to Stavanger, but that area had too much fishing gear in the way to proceed with AUV/video surveys.
4 - People
Surname
First name
Institute
Main Tasks
Bakkeplass
Kjell Gunnar
NMD
Data management
Christensen
Lene
HI
Biology/Instrument (AUV)
Dahl
Martin
HI
Instrument (Ship)
Ernstsen
Eyvind
HI
Instrument (AUV)
Fuglevik
Anders
HI
Chemistry (sampling)
Haugland
Barbro Taraldset
HI
Biology (video, sampling)
Johansen
Yngve Klungseth
HI
Biology (video, sampling)
Johansson
Maria Josefina
HI
Biology (video, sampling)
Kartveit
Kyrre Heldal
HI
Biology/Geology/Instrument (AUV)
Larsen
Sindre Nygård
HI
Instrument (Chimera)
Meek
Tor Jan
Kartverket
Hydrography (AUV)
Meyer
Heidi Kristina
HI
Biology (AUV)
Ohnstad
Leif Johan
HI
Instrument (AUV)
Piechaud
Nils
HI
Biology (AUV)
Plassen
Liv
NGU
Geology (video, sampling)
Plotkin
Alexander
HI
Biology (video, sampling)
Ross
Rebecca
HI
Cruise leader (biology, all)
Saint-André
Camille
HI
Biology (video, sampling)
Shyam
Chand
NGU
Geology (video, sampling, AUV)
Thorsnes
Terje
NGU
Geology (video, sampling, AUV)
Vee
Ida
HI
Biology (video, sampling)
Voronkov
Andrey
HI
Biology (video, sampling)
Wiberg
Daniel Hesjedal
NGU
Geology (video, sampling)
5 - Activities
Priority
Chimera video stations (inc. attached mini grab; Biology, Geology)
Gravity corer (Geology, Chemistry – at the request of the Oil Directorate)
AUV testing and data collection (Geology, Hydrography, Biology)
Lower Priority
Boxcorer (Chemistry, Biology)
Multicorer (Chemistry, Geology, Biology)
Grabs (Biology, Geology)
6 - Collected Data
Infrmation about the data collected is here shown in the form of overview maps and a table of stations. More details are available in the day by day overview appendix or can be given upon request.
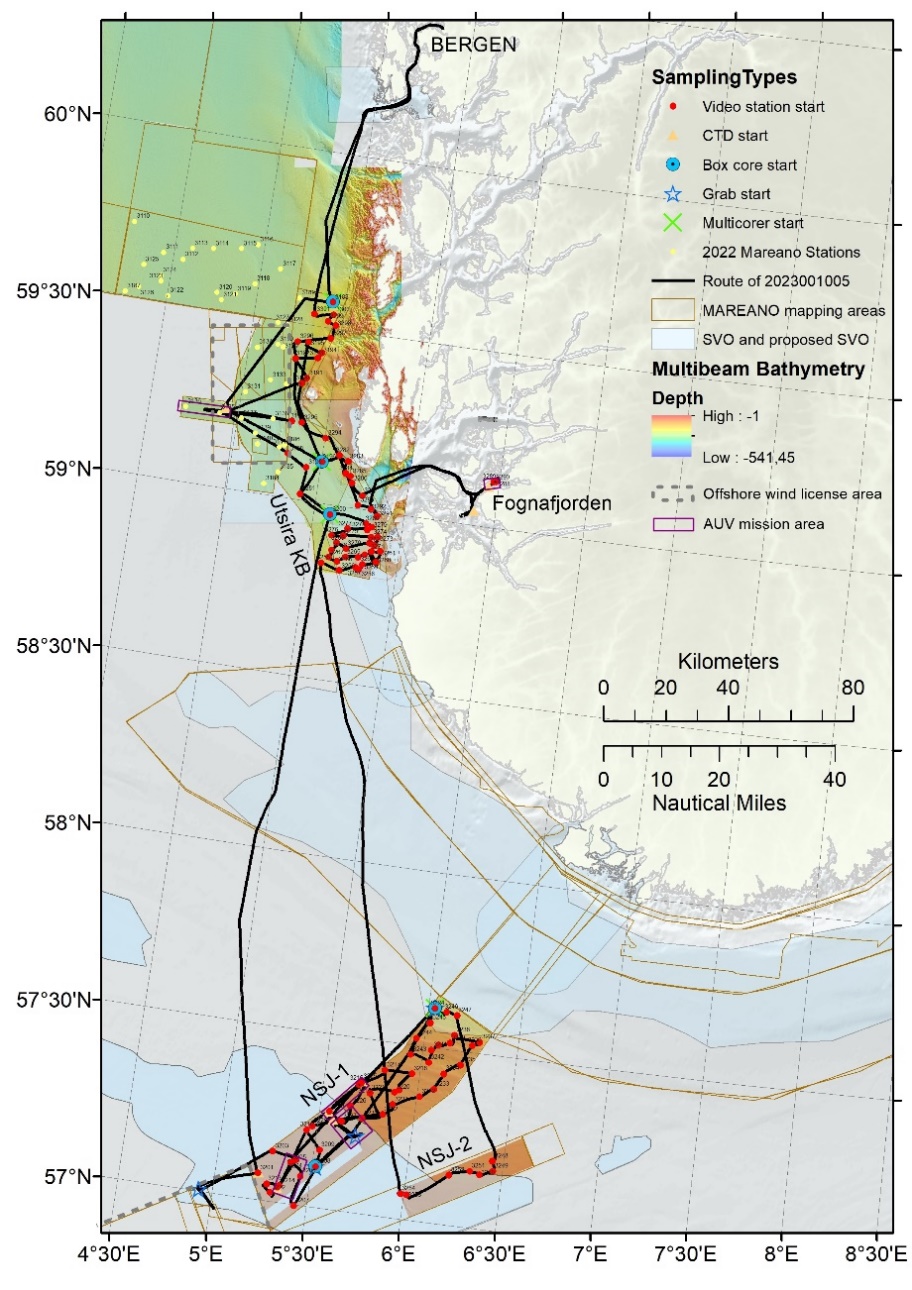
Figure 2 An overview map showing the route of the cruise: Bergen, Utisira KB, NSJ1, NSJ2, Utsira KB, Fognafjorden, Utsira KB, Bergen (zoomed in maps of subareas follow)
The following maps show the overview of the route of this cruise and the sampling stations. A table follows showing all stations, data types collected there and a short description of what was seen on video lines.
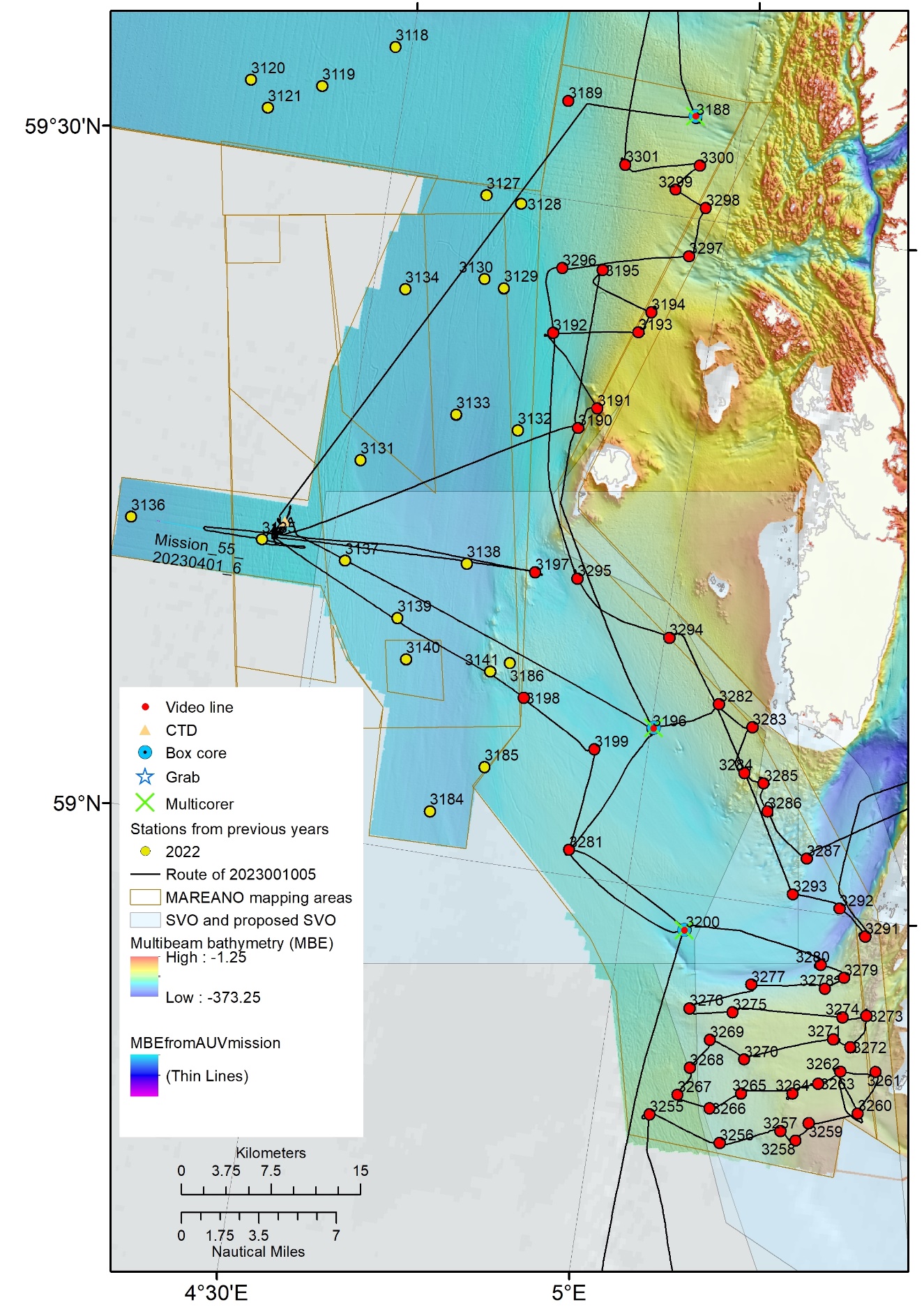
Figure 3 The Utsira Kyst Belt area showing reference station numbers sampled on this cruise (the numbering shows the order we visited them, starting at 3188-3200, then 3255-3301 excluding 3288-3290). Repeat visits to the area outside of 12nm were required for AUV testing.
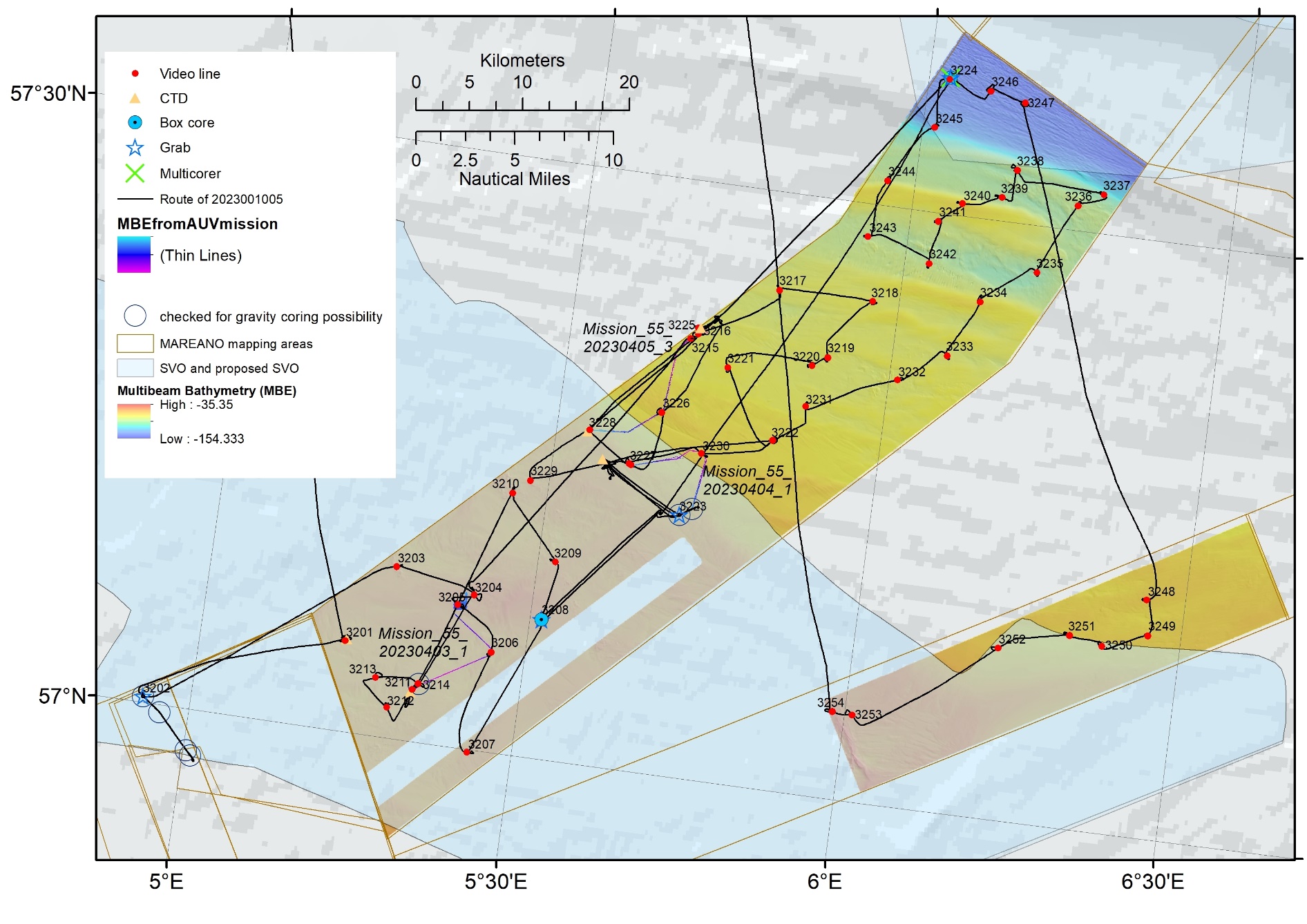
Figure 4 NSJ-1 (the larger area, reference stations 3201-3247, but excluding 3202 which is in the Sørlig Nordsjø II area and will be sampled in the future, here visited to check for the possibility of gravity coring with only a single grab sample taken) and NSJ-2 (smaller area, reference stations 3248-3254).
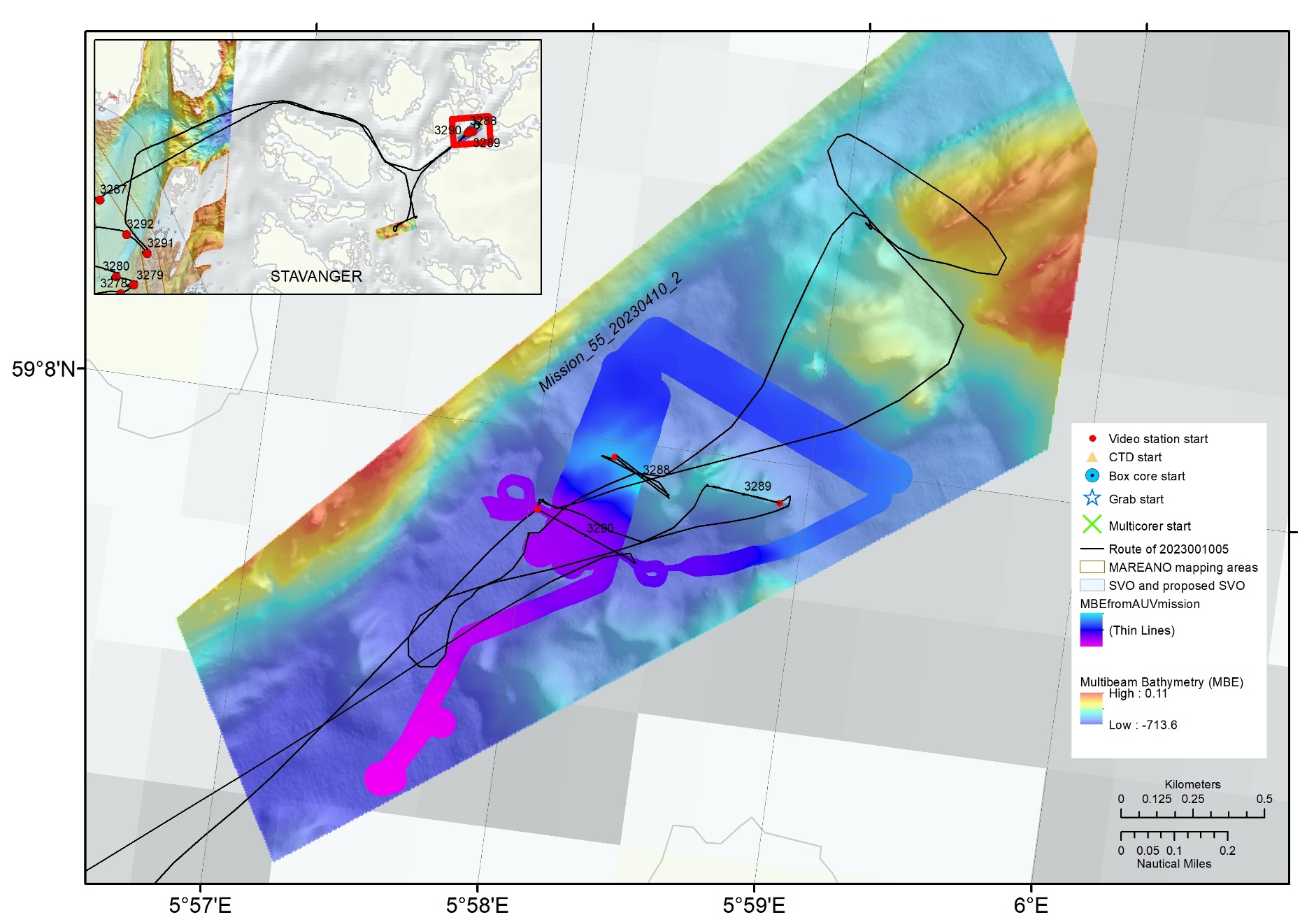
Figure 5 On our second visit to Utsira, poor weather sent us inshore near Stavanger to Fognafjorden (the plan B weather retreat area where FOH approved the declassification of the seafloor for AUV testing. The plan A area in Horgefjorden, see inset, was checked but had too much fishing gear, marked by floats, to have confidence that we could launch the AUV or chimera safely) showing the AUV survey area where we have complete data (some was lost at the end of the mission, not marked), and the three Chimera video lines (R stations 3288-3290) – again other sites were prioritised in the NE but we found too much fishing gear in the way.
Data Collection Overview Tables
Table 1 - Overview of activities in order of R station per area(broken down with more detail in subsequent tables)
Date
Ended
Area
Pno
Rno
VLno
Ctd IDno
Box Corer IDno
Multi Corer IDno
Grab IDNo
AUV mission No
Comment
30.03
UtsiraKB
P42
3188
3269
2
3
31.03
UtsiraKB
P114
3189
3270
1.04
UtsiraKB
AUV_2023_Utsira_1a
253
Mission_55_ 20230401_6
ctd ON 31.03, auv 01.04, 1.5hrs data on 5.5hrs dive - 30m offset, low ping rate, blurry photos
31.03
UtsiraKB
P172
3190
3271
31.03
UtsiraKB
P173
3191
3272
31.03
UtsiraKB
P95
3192
3273
31.03
UtsiraKB
P174
3193
3274
31.03
UtsiraKB
P124
3194
3275
1.04
UtsiraKB
P181
3195
3276
Bumped into wreck
9.04
UtsiraKB
P165
3196
3361
3
6
Samples on 01.04, VL on 09.04
1.04
UtsiraKB
P111
3197
3277
1.04
UtsiraKB
P108
3198
3278
1.04
UtsiraKB
P99
3199
3279
9.04
UtsiraKB
P166
3281
3360
Topaz line on 01.04, VL on 09.04
9.04
UtsiraKB
P67
3200
3359
4
7
Samples on 02.04, VL on 09.04
2.04
NJS1
P548
3201
3280
254
2.04
NJS1
GC1
3202
8
2.04
NJS1
P569
3203
3281
2.04
NJS1
P570
3204
3282
2.04
NJS1
P588
3205
3283
2.04
NJS1
P564
3206
3284
3.04
NJS1
P580
3207
3285
3.04
NJS1
P547
3208
3286
5
10-15
Grabs and boxcorer on 04.04
3.04
NJS1
P566
3209
3287
3.04
NJS1
P587
3210
3288
3.04
NJS1
P546
3211
3289
255
CTD as close to AUV station
3.04
NJS1
P579
3212
3290
3.04
NJS1
P563
3213
3291
3.04
NJS1
P577B/by GC5
3214
3292
3.04
NJS1
AUV_2023_NSJ_2a
Mission_55_ 20230403_1
full dataset quality good, MBE pingrate too slow
3.04
NJS1
P584
3215
3293
3.04
NJS1
P577A/by P584
3216
3294
3.04
NJS1
P562
3217
3295
3.04
NJS1
P575A/NW
3218
3296
3.04
NJS1
P589
3219
3297
3.04
NJS1
P576
3220
3298
4.04
NJS1
P551
3221
3299
5.04
NJS1
P582
3222
3300, 3307
VL3300 on 04.04 includes ony scanning still section before Chimeral fail, returned next day
4.04
NJS1
AUV_2023_NSJ_3c
256
Mission_55_ 20230404_6
full dataset quality good, MBE pingrate still too slow despite attempted change
4.04
NJS1
GC5B
3223
9
AUV dive has data inc photos here
6.04
NJS1
P543
3224
3323
6-7
8
16-21
Took video on 06.04
4.04
NJS1
Extra 1
3225
3301
257
Alongside P577A/ AUV launch site
4.04
NJS1
AUV_2023_NSJ_4a
Mission_55_ 20230405_3
full dataset quality good, MBE pingrate still too slow (but good on internal trigger)
4.04
NJS1
P560
3226
3302
4.04
NJS1
P552
3227
3303
Jordfeil first time before VL - kept R and VL numbers for return later in day
6.04
NJS1
P550
3228
3304
258
6.04
NJS1
P578
3229
3305
6.04
NJS1
P586
3230
3306
6.04
NJS1
P561
3231
3308
6.04
NJS1
P575B/SE
3232
3309
6.04
NJS1
P568
3233
3310
6.04
NJS1
P581
3234
3311
6.04
NJS1
P549
3235
3312
6.04
NJS1
P573
3236
3313
6.04
NJS1
P571
3237
3314
6.04
NJS1
P553
3238
3315
6.04
NJS1
P572
3239
3316
6.04
NJS1
P574
3240
3317
6.04
NJS1
P557
3241
3318
6.04
NJS1
P558
3242
3319
6.04
NJS1
P559
3243
3320
6.04
NJS1
P554
3244
3321
6.04
NJS1
P545
3245
3322
6.04
NJS1
P544
3246
3324
7.04
NJS1
P590
3247
3325
7.04
NJS1
P567
3248
3326
7.04
NSJ2
P555
3249
3327
7.04
NSJ2
P556
3250
3328
7.04
NSJ2
P542
3251
3329
Moved start point due to weather (changed angle to waves) to 57*09.833 N, 006*19.507 E
7.04
NSJ2
P583
3252
3330
Suspected wreck was a lost container, posibly 2 - one intact
7.04
NSJ2
P565
3253
3331
7.04
NSJ2
P585
3254
3332
8.04
UtsiraKB
P118
3255
3333
8.04
UtsiraKB
P128
3256
3334
8.04
UtsiraKB
P41
3257
3335
8.04
UtsiraKB
P158
3258
3336
8.04
UtsiraKB
P115
3259
3337
8.04
UtsiraKB
P159
3260
3338
8.04
UtsiraKB
P50
3261
3339
8.04
UtsiraKB
P53
3262
3340
8.04
UtsiraKB
P44
3263
3341
8.04
UtsiraKB
P119
3264
3342
8.04
UtsiraKB
P48
3265
3343
8.04
UtsiraKB
P116
3266
3344
8.04
UtsiraKB
P133
3267
3345
8.04
UtsiraKB
P117
3268
3346
8.04
UtsiraKB
P129
3269
3347
8.04
UtsiraKB
P127
3270
3348
9.04
UtsiraKB
P45
3271
3349
9.04
UtsiraKB
P131
3272
3350
9.04
UtsiraKB
P120
3273
3351
9.04
UtsiraKB
P54
3274
3352
9.04
UtsiraKB
P126
3275
3353
9.04
UtsiraKB
P122
3276
3354
9.04
UtsiraKB
P63
3277
3355
9.04
UtsiraKB
P47
3278
3356
9.04
UtsiraKB
P125
3279
3357
9.04
UtsiraKB
P160
3280
3358
9.04
UtsiraKB
P46
3282
3362
9.04
UtsiraKB
P43
3283
3363
9.04
UtsiraKB
P164
3284
3364
9.04
UtsiraKB
P123
3285
3365
10.04
UtsiraKB
P52
3286
3366
10.04
UtsiraKB
P163
3287
3367
10.04
StavangerFjords
AUV_stav_PlanA
259
10.04
StavangerFjords
AUV_stav_PlanB
260
Mission_55_ 20230410_2
10.04
StavangerFjords
FJ14
3288
3368
10.04
StavangerFjords
FJ15
3289
3369
10.04
StavangerFjords
FJ16
3290
3370
is 380m long for photo groundtruthing - but stop still ab at 225m and start c for the end
11.04
UtsiraKB
P130
3291
3371
11.04
UtsiraKB
P161
3292
3372
11.04
UtsiraKB
P162
3293
3373
11.04
UtsiraKB
P49
3294
3374
11.04
UtsiraKB
P171
3295
3375
11.04
UtsiraKB
P106
3296
3376
11.04
UtsiraKB
P176
3297
3377
11.04
UtsiraKB
P132
3298
3378
11.04
UtsiraKB
P121
3299
3379
11.04
UtsiraKB
P51
3300
3380
11.04
UtsiraKB
P110
3301
3381
Table 2 - Video line data (in order of R station per area)
Date Ended 2023
Area
Pno
Rno
Vlno
Content of VL
VME (Yes No Maybe)
30.03
UtsiraKB
P42
3188
3269
Funiculina garden, predatory actiniaria
YES
31.03
UtsiraKB
P114
3189
3270
Ostur, E. spinax
YES
31.03
UtsiraKB
P172
3190
3271
Sea pen garden
YES
31.03
UtsiraKB
P173
3191
3272
Bedrock and sponges
YES
31.03
UtsiraKB
P95
3192
3273
Burrows, sea pens, some stones with HB sponges
MAYBE
31.03
UtsiraKB
P174
3193
3274
HB sponge garden
YES
31.03
UtsiraKB
P124
3194
3275
HB sponge garden
YES
1.04
UtsiraKB
P181
3195
3276
Ship wreck
NO
9.04
UtsiraKB
P165
3196
3361
Funiculina garden
YES
1.04
UtsiraKB
P111
3197
3277
HB sponge garden
YES
1.04
UtsiraKB
P108
3198
3278
Sponges
YES
1.04
UtsiraKB
P99
3199
3279
Funiculina garden
YES
9.04
UtsiraKB
P166
3281
3360
Fuiculina, virgulariidae field
YES
9.04
UtsiraKB
P67
3200
3359
Funiculina
YES
2.04
NJS1
P548
3201
3280
Sand waves, Astropecten, Asterias
NO
2.04
NJS1
P569
3203
3281
Modiolus eg. 60%, lithothamnion
YES
2.04
NJS1
P570
3204
3282
Asterias, sand ripples
NO
2.04
NJS1
P588
3205
3283
Gravel waves, Hysa, Pleuronectiformes
NO
2.04
NJS1
P564
3206
3284
Paguridae
NO
3.04
NJS1
P580
3207
3285
Buccinidae
NO
3.04
NJS1
P547
3208
3286
Pleuronectiformes,Asteriidae
NO
3.04
NJS1
P566
3209
3287
Pleuronectiformes, Buccinidae, Asteroidea
NO
3.04
NJS1
P587
3210
3288
Alcyonium digitatum, Modiolus e.g 10%
NO
3.04
NJS1
P546
3211
3289
Astropecten, Buccinoidea
NO
3.04
NJS1
P579
3212
3290
Astropecten
NO
3.04
NJS1
P563
3213
3291
Sand ripples, Astropecten, Asterias
NO
3.04
NJS1
P577B/ by GC5
3214
3292
Astropecten
NO
3.04
NJS1
P584
3215
3293
Mosaic, reteporella, bolocera, sea pens, diverse
YES
3.04
NJS1
P577A/ by P584
3216
3294
Virgulariidae
YES
3.04
NJS1
P562
3217
3295
Tobis (ammodytes)
NO
3.04
NJS1
P575A/ NW
3218
3296
Spatangus
NO
3.04
NJS1
P589
3219
3297
Epizoanthus
NO
3.04
NJS1
P576
3220
3298
Hippasteria
NO
4.04
NJS1
P551
3221
3299
Bolocera
NO
5.04
NJS1
P582
3222
33003307
Wreck
NO
6.04
NJS1
P543
3224
3323
Parastichopus
NO
4.04
NJS1
Extra 1
3225
3301
Virgulariidae garden, bolocera among rocks, filograna
YES
4.04
NJS1
P560
3226
3302
Astropecten
NO
4.04
NJS1
P552
3227
3303
Astropecten
NO
6.04
NJS1
P550
3228
3304
Sand, low diversity
NO
6.04
NJS1
P578
3229
3305
Alcyonium, asteroids, filograna
NO
6.04
NJS1
P586
3230
3306
Astropecten
NO
6.04
NJS1
P561
3231
3308
Virgulariidae, bolocera
YES
6.04
NJS1
P575B/ SE
3232
3309
Maxmuelleria faex
NO
6.04
NJS1
P568
3233
3310
Spatangus virgulariidae
NO
6.04
NJS1
P581
3234
3311
Gracilechinus
NO
6.04
NJS1
P549
3235
3312
Spatangus
NO
6.04
NJS1
P573
3236
3313
Sand then rocks and bolocera
NO
6.04
NJS1
P571
3237
3314
Cerianthidae, Luidia sarsi
NO
6.04
NJS1
P553
3238
3315
Spatangus, virgulariidae
YES
6.04
NJS1
P572
3239
3316
Luidia sarsi, sand waves
NO
6.04
NJS1
P574
3240
3317
Gracilechinus
NO
6.04
NJS1
P557
3241
3318
Spatangus, gracilechinus
NO
6.04
NJS1
P558
3242
3319
Virgulariidae sea pen garden
YES
6.04
NJS1
P559
3243
3320
Caridea, bolocera
NO
6.04
NJS1
P554
3244
3321
Gracilechinus
NO
6.04
NJS1
P545
3245
3322
Gracilechinus
NO
6.04
NJS1
P544
3246
3324
Parastichopus
NO
7.04
NJS1
P590
3247
3325
Parastichopus
NO
7.04
NJS1
P567
3248
3326
Spatangus, hyse
NO
7.04
NSJ2
P555
3249
3327
Alcyonium
NO
7.04
NSJ2
P556
3250
3328
Spatangus, astropecten
NO
7.04
NSJ2
P542
3251
3329
Gracilechinus, astropecten
NO
7.04
NSJ2
P583
3252
3330
Astropecten, lost container
NO
7.04
NSJ2
P565
3253
3331
Leptasterias
NO
7.04
NSJ2
P585
3254
3332
Echinus, Alcyonium
NO
8.04
UtsiraKB
P118
3255
3333
HB sponge garden
YES
8.04
UtsiraKB
P128
3256
3334
Isidella, bonellia
YES
8.04
UtsiraKB
P41
3257
3335
Oceanapia garden
NO
8.04
UtsiraKB
P158
3258
3336
Gravel, Wreck (U-boat?)
NO
8.04
UtsiraKB
P115
3259
3337
megawaves and ripples
NO
8.04
UtsiraKB
P159
3260
3338
Axinellidae, porifera dense branched
YES
8.04
UtsiraKB
P50
3261
3339
Munida, patches o HB sponge garden
YES
8.04
UtsiraKB
P53
3262
3340
Sand occasional parastichopus
NO
8.04
UtsiraKB
P44
3263
3341
Muddy sand, flat, parastichopus, Phakellia
NO
8.04
UtsiraKB
P119
3264
3342
Oceanapia sponge ground
NO
8.04
UtsiraKB
P48
3265
3343
Oceanapia, Etmopterus spinax
NO
8.04
UtsiraKB
P116
3266
3344
Bonellidae & HB sponge garden
YES
8.04
UtsiraKB
P133
3267
3345
HB sponge garden
YES
8.04
UtsiraKB
P117
3268
3346
Bonellidae, HB sponge garden
YES
8.04
UtsiraKB
P129
3269
3347
HB sponge garden
YES
8.04
UtsiraKB
P127
3270
3348
Oceanapia
NO
9.04
UtsiraKB
P45
3271
3349
Oceanapia, decapoda
NO
9.04
UtsiraKB
P131
3272
3350
Quasillina
NO
9.04
UtsiraKB
P120
3273
3351
HB sponges, crabs, porania
YES
9.04
UtsiraKB
P54
3274
3352
Parastichopus
NO
9.04
UtsiraKB
P126
3275
3353
sponge garden inc stryphnus, geodia
YES
9.04
UtsiraKB
P122
3276
3354
Edge of a HB sponge garden whole way
YES
9.04
UtsiraKB
P63
3277
3355
Nephrops, sparse funiculina
NO
9.04
UtsiraKB
P47
3278
3356
Oceanapia & Nephrops, patch HB sponge garden
YES
9.04
UtsiraKB
P125
3279
3357
HB sponge garden & munida on soft
YES
9.04
UtsiraKB
P160
3280
3358
Bolocera
NO
9.04
UtsiraKB
P46
3282
3362
Sea pen garden, parastichopus
YES
9.04
UtsiraKB
P43
3283
3363
Antho dichotoma
YES
9.04
UtsiraKB
P164
3284
3364
"OXLEY" submarine wreck
NO
9.04
UtsiraKB
P123
3285
3365
Ostur
YES
10.04
UtsiraKB
P52
3286
3366
Funiculina garden
YES
10.04
UtsiraKB
P163
3287
3367
HB coral garden
YES
10.04
Fognafjorden
FJ14
3288
3368
Funiculina, cerianthidae, net
YES
10.04
Fognafjorden
FJ15
3289
3369
Cerianthidae
NO
10.04
Fognafjorden
FJ16
3290
3370
Cerianthidae, net, sharks
NO
11.04
UtsiraKB
P130
3291
3371
Hard bottom sponge ground
YES
11.04
UtsiraKB
P161
3292
3372
Sparse sea pens, nephrops, neohela
YES
11.04
UtsiraKB
P162
3293
3373
Hard bottom sponge ground/ coral garden
YES
11.04
UtsiraKB
P49
3294
3374
Mixed sea pen garden, HB sponge garden patch
YES
11.04
UtsiraKB
P171
3295
3375
Wooden wreck covered in Primnoa
MAYBE
11.04
UtsiraKB
P106
3296
3376
Nephrops, patches of HB sponges
NO
11.04
UtsiraKB
P176
3297
3377
50% wreck, some sea pens, nephrops
MAYBE
11.04
UtsiraKB
P132
3298
3378
HB/ ostur sponge garden
YES
11.04
UtsiraKB
P121
3299
3379
HB/ ostur sponge garden
YES
11.04
UtsiraKB
P51
3300
3380
Sea pen field patchy
MAYBE
11.04
UtsiraKB
P110
3301
3381
HB/ ostur sponge garden
YES
Table 3 - Full Stations (in order of R station per area)
DateEnded
Area
Pno
Rno
Vlno
ctdIDno
BoxCIDno
MultiCIDno
GrabIDNo
Comment
30.03
UtsiraKB
P42
3188
3269
2
3
31.03
UtsiraKB
P172
3190
3271
9.04
UtsiraKB
P165
3196
3361
3
6
Samples on 01.04, VL on 09.04
9.04
UtsiraKB
P67
3200
3359
4
7
Samples on 02.04, VL on 09.04
8.04
UtsiraKB
P53
3262
3340
2.04
NSJ1
P548
3201
3280
254
3.04
NJS1
P547
3208
3286
5
10-15
Grabs and boxcorer on 04.04
6.04
NJS1
P543
3224
3323
6-7
8
16-21
Took video on 06.04
Table 4 - Petroleum Directorate gravity corer investigation sites, note that none were deemed suitable for gravity coring and therefore no gravity cores were taken on this cruise
Date Ended
Area
Pno
Rno
Topaz
Watercolumn MBE
Grab IDNo
Comment
2.04
Sørlige Nordsjø II
GC1
3202
YES
YES
8
Retained as possible future Mareano R station
2.04
Sørlige Nordsjø II
GC2
YES
YES
2.04
Sørlige Nordsjø II
GC3
YES
YES
2.04
Sørlige Nordsjø II
GC4
YES
YES
3.04
NJS1
GC5
No
No
AUV Mission_55_20230403_1 has MBE/HiSAS/photo data here
4.04
NJS1
GC5B
3223
YES
YES
9
AUV Mission_55_20230404_1 has data here
Table 5 - AUV mission and associated CTD sites. Note that additional information is available about AUV dives in Appendix 2
Date Ended
Area
Pno
VLno overlaps
ctdIDno
AUV missionNo
Comment
1.04
UtsiraKB
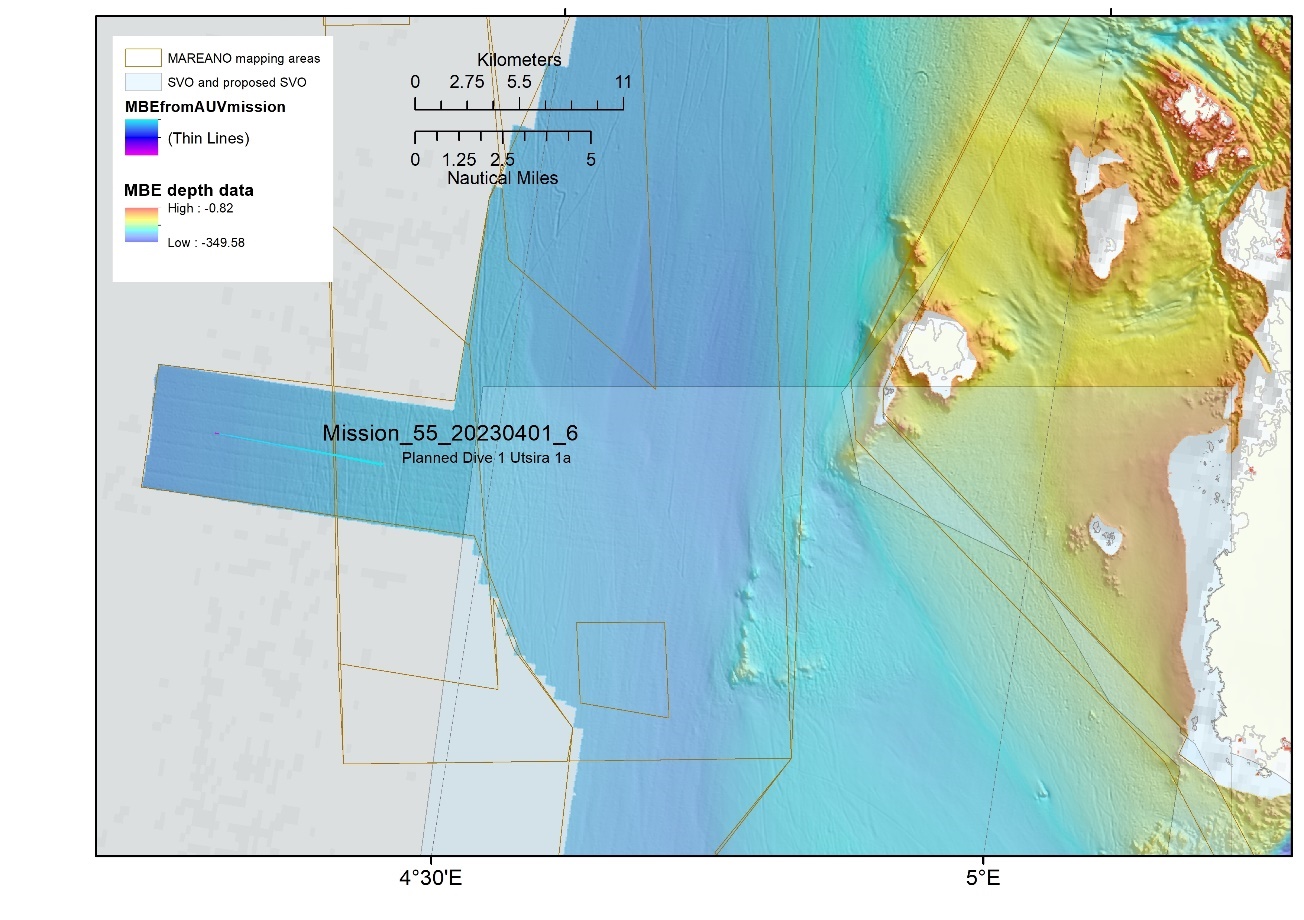
AUV_2023_Utsira_1a
VL3216, VL3217
253
Mission_55_ 20230401_6
ctd ON 31.03, auv 01.04, 1.5hrs data on 5.5hrs dive - 30m offset, low ping rate, blurry photos
3.04
NJS1
AUV_2023_NSJ_2a
VL3284, VL3282
254 (at R3201)
Mission_55_ 20230403_1
full dataset quality good, MBE pingrate too slow
4.04
NJS1
AUV_2023_NSJ_3c
VL3306, VL3303
255 (at R3211),
256
Mission_55_ 20230404_6
full dataset quality good, MBE pingrate still too slow despite attempted change
4.04
NJS1
AUV_2023_NSJ_4a
VL3294, VL3293, VL3302, VL3304
257 (at R3225),
258 (at R3228)
Mission_55_ 20230405_3
full dataset quality good, MBE pingrate still too slow (but good on internal trigger)
10.04
Stavanger Fjords
AUV_stav_PlanA
n/a
259
n/a
too much fishing gear in the water, dive cancelled
10.04
Stavanger Fjords
AUV_stav_PlanB
VL3370
260
Mission_55_ 20230410_2
successful until last
7 - Issues
Chimera:
Had one incident that I will take some blame for as the Chimera bumped into a wreck that I failed to flag as possibly present in advance of the dive: damage to the wire which needs reterminating, with Sindre swapping to the yellow cable as a temporary fix for the rest of the cruise. I will suggest that we build a better routine for dealing with possible wrecks – including having images of the multibeam at that spot that at least can guide where the wreck may occur in relation to distance along the video line. This procedure was adopted afterwards for all subsequent possible wrecks. Encountering wrecks is not normal for Mareano, which is used to working in the Norwegian Sea and Barents Sea, with new operations in the North Sea these encounters are likely to increase, so this is a good time to build procedures.
Many faults from earth faults to pan and tilt issues to black outs. Sindre has worked very hard to keep the Chimera going and it worked out fine in the end but it is a good idea to ensure we have Chimera instrument cover for 24hrs even on AUV cruises in the future.
We have had a request from the winch operators to upgrade the pilot cameras into a good quality forward facing camera and another downward facing camera to better monitor distance from bottom/objects passing underneath (e.g. wrecks). The existing pilot camera could be moved into the downward facing position requiring only the purchase of the better quality forward facing camera. Both should have a wide field of view.
AUV:
The buoyancy is very hard to get right but once you do there is a good chance it will dive as planned. Any time the Munin+ fails to dive is most likely a need to fine tune the buoyancy. This is a design fault of the Munin+ which is particularly unhelpful when coupled with the 5min dive rule and restart procedure (see below). Leif is now setting up a buoyancy guide that responds to the density recorded by the CTD they need for the SVP input before the first dive in an area – this should help speed up the process of optimising the buoyancy but will not guarantee it dives on first try.
If the vehicle does not dive in the first 5mins of trying it will automatically cancel the mission and not try again. As a result you must remove the vehicle from the water and restart the process ( takes ~1hr).
Restarts are very commonly needed, both from buoyancy issues, but also from minor faults/frequent error messages that require a restart to clear. Each time it takes ~1hr to be ready to dive again (multiple steps must be gone through and then the positional accuracy of the GPS needs to drop below 0.1 which takes the majority of the time - NB driving the ship in figures of eight can speed the GPS calibration up.)
There seems to have been a connection problem between the vehicle computer (CP) and the NAS bottle (PP) which sometimes results in the vehicle stopping collecting data half way through a dive - this is not acceptable and must be fixed (I believe Leif and Jan Arne are chasing Kongsberg to look into this already)
There were some issues noted with the MBE data from the AUV and problems with positioning – where overlapping lines in opposite directions have a mismatch in positioning and depth e.g. lines 6 or 7mins long, about 25mins apart with 180 degree turns between crossing the same point and showing 1m drift in position and 10cm drift in depth. This has already been relayed to Kongsberg. More details can be found in Appendix 3.
It would be beneficial to do more testing with the AUV (not using project money!) to see what equipment and settings cause interference in the data (for example, we have had inconsistent results about using the internal trigger for the MBE - sometimes no sign of noise in the HiSAS, sometimes clear noise, so uncertain if there is something else causing the noise). Investigations could be made into turning on and off the topaz, fish echosounders etc from the ship while the AUV is in the water to monitor the effects (especially if there are distinctive patterns suggesting one particular piece of equipment is interfering). This would be useful to ensure appropriate routines are set up for switching things off/selecting appropriate settings when working in the same area as the AUV.
Generally, a great improvement on Mareano’s initial testing cruise in June 2022 (2022106), and huge thanks to the AUV team (Leif Johan, Eyvind, Lene, Kyrre) who worked very hard to minimise these issues – it is clear that there are many limitations to the vehicle that they cannot work around and we all just have to wait for!
AUV GPS calibrated and CTD (#253) taken - NOTE AUV and CTD linked to AUV have been logged with R stations – this is not appropriate, but toktlogger is limited in how it can cope with this (needs a number >0 for the superstation) As a result Kjell says that he will correct them afterwards, but we must remember to reuse that R number at the next station.
AUV going in the water kl. 12.00 (4hrs set up) for AUV
Several attempts – AUV will not dive (buoyancy too light, adjustments between)
New shorter dive plan made (1.5hrs)
Attempt to dive kl. 15.15 – lost radio contact while at the surface, automatic wait time of 15mins, should dive at end of wait period 15.30, no success
AUV removed from water ~16.00 with AUV testing finished for the day (so that they can consult Kongsberg)
Started transiting to full station P172 as chimera was still not working, but managed to have it ready for testing again by the time of arrival (~17.00) resulting in a successful VL: R3190 VL3271
Then able to proceed with a series of video stations into the evening: P173 R3191 VL3272, P95 R3192 VL3273, P174 R3193 VL3274, P124 R3194 VL3275,
P181 R3195 VL3276 I failed to warn of the shipwreck (although this was marked on the map), VL started and they spotted debris and slowed until debris stopped and they sped up again with the Chimera bumping into the wreck.
Chimera cable and a couple of connections damaged. Sindre working to re-terminate with the yellow cable.
Transited to full station P165 R3196 and took boxcore (for Stepan) and multicore before departing to head for the AUV site for arrival at 09.00.
Kongsberg did not give a good explanation for the issues yesterday (suggested some possible causes that the team disagree with), but AUV restart looks good.
Figure 7 Hard bottom sponge garden at R3193 VL3274
01.04.2023 08.00 – 02.04.2023 08.00 Utsira, transit to NSJ-1
AUV went in the water but again would not dive beneath the surface. Recovered to deck to adjust weight in nose, but encountered new issues with communications, and then the rope release system on the stinger.
Chimera fixing and deck testing completed, then wet test at the AUV station down to 30m - all seems fixed and ready to use.
AUV_2023_utsira_1a (Dive 1, Missions_55_20230401_6) successful dive, pinged with ship then left to do video station.
AUV sent satellite message that should only happen if at surface but time attached was 2hrs earlier – returned to check on it (30min diversion), but was fine and still on bottom so left to go to video station again.
Went to P111 R3197 VL3277, successful video dive with hard bottom sponge garden
Return to pick up AUV – some error messages reported upon arrival – data only collected in first 1.5hrs of 5hr dive, photos taken after all other sensors switched off – all blurry. Hoping focus is linked to lack of altimetry input. Sending reports to Kongsberg for explanation.
Transit to evening video stations: P108 R3198 VL3277, P99 R3199 VL3279 –had issues with pan and tilt wandering or freezing at both stations.
P166 ran topaz but Chimera now not functioning at all ~kl.01:00
P67 R3200 took Boxcorer 4 and Multicorer 7
~Kl. 02:30 begin transit to NSJ-1 (13hrs).
Figure 8 A pandalid shrimp sitting on an Axinellid sponge on R3197 VL3277
02.04.2023 kl.08.00 – 03.04.2023 kl.08.00 Transit from Utsira, NSJ-1
Chimera reported as working again at kl. 12.45
Arrive 13.00 at NSJ-1 P548 to launch AUV (needed to take CTD (#254) then drive in figure of 8 to improve AUV navigational accuracy) but AUV had a communications issue kl.14.00 before launch.
Take Video R3201 VL3280 while AUV restarting (needs ~1hr to reset)
Try again to launch AUV – would not dive and too late to try again today
Collect AUV then proceed to GC1 (1hr away)
Drive from G1 to G2, then GC3, then GC4 with topaz on
Drive from GC4 to GC3, then GC2, then GC1 with watercolumn MBE on
Take grab at GC1 to check suitability for gravity core (gave R station as may return next year)– no good, and rest of points were ruled out too (needs vibrocorer as is too sandy)
Head over to do videos overnight: P569 R3203 VL3281, P570 R3204 VL3282, P588 R3205 VL3283, P564 R3206 VL3284, P580 R3207 VL3285, P547 R3208 VL3286, P566 R3209 VL3287, P587 R3210 VL3288
Figure 9 A Modiolus modiolus bed as seen on R3203 VL3281
Transit to AUV station near P546 arriving ~kl.09.00
Deploy AUV which dives first time, receive some errors likely relating to difficulties with acoustic contact in shallow (57m) water, but occasional updates in the first 10mins were enough to reassure.
Do videos while AUV is in the water: P546 R3211 VL3289, P579 R3212 VL3290, P563 R3213 VL3291, P577/GC5 R3214 VL3292 (NB P577 we agreed to move but had enough time for one more before AUV pick up and not enough time to go somewhere else)
Pick up AUV kl. 15.30 (near P570/R3204) – required MOB boat as AUV had not “popped its nose” (which releases the recovery rope)
AUV dive was successful and collected 1.2TB in 5.5hrs (Dive 2, AUV_2023_NSJ_2a, Missions_55_20230403_1).
Transit for 1.5hrs to first video stations for the night: P584 R3215 VL3293, P577 (the one near the noise point/ P584) R3216 VL3294, P562 R3217 VL3295, P575A/NW R3218 VL3296, P589 R3219 VL3297, P576 R3220 VL3298, P551 R3221 VL3299
Continued to P582 R3222 VL3300 (a wreck site) and recorded still section of VL but the tilt broke on Chimera and was stuck pointing straight down (stayed for 2hrs to try to fix – the nearest full station was 2hrs away and it would be 2hrs back to the AUV site which we needed to be at within 4hrs).
Left without having Chimera fixed and headed to the AUV site for arrival kl.08.00
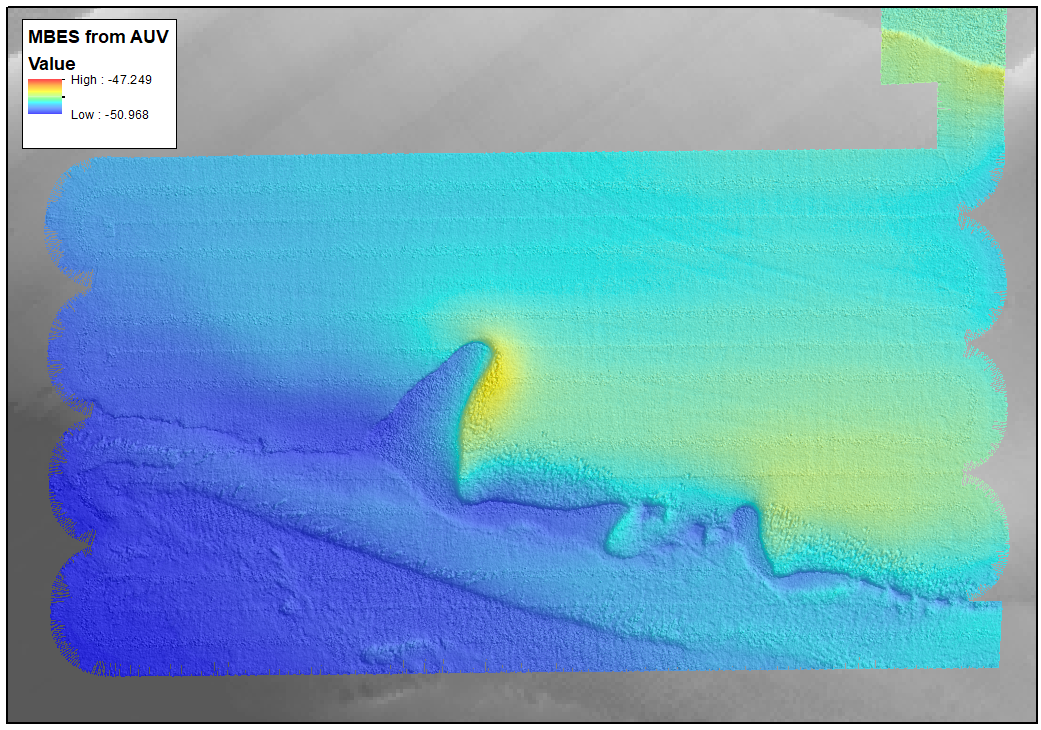
Figure 10 Image of multibeam bathymetry collected by AUV Missions_55_20230403_1 over a 1m high bedforms
AUV required restart (1hr delay) so transited to GC5B and drove Multibeam watercolumn line over GC5B and GC5A then back again with topaz – looks hard and not suitable for a gravity corer.
Returned to AUV launch location and tried to launch again – AUV failed to dive again, so needed 1hr for restart. Chimera still not operational and no physical samples needed in immediate area (nearest is 1hr drive away). Stayed in position to await AUV restart/ Chimera to be fixed.
Launched AUV again, again failed to dive, so moved to GC5B during 1hr restart for a Grab (R3223 Grab9) – Chemistry, Geology, UiB rest sample.
Flipped AUV dive to start from same location: removed nearly all air from AUV and successfully dived down so was left to continue mission
Transit to P547 (R3208) for 5x grab samples (grab was on the wire so we took that first includes 1 failed #10-15), 1x boxcorer (#5)
Transit to pick up AUV – successful dive (AUV_2023_NSJ_3c, Missison_55_20230404_6)
Chimera still out of service so transit to full station 3hours away P543 (R3224) and take boxcorer for chemistry (#6-7), multicorer (#8), grab x 5 (#16-21).
Sindre worked on Chimera all night – no activity during this time
Decided to move to the AUV launch position
Figure 11 Launching the grab as seen from the back of the hanger
Chimera ready for testing 1hr before the AUV, so designed an “extra” station alongside AUV launch site (~500m away) to test Chimera in the water over a useful target - success: R3225 VL3301
Took CTD (#257) at same site for AUV benefit – only 500m from AUV launch site
At AUV launch site, AUV needed 2 restarts on deck, dropped one more weight into the water (unpredictably) while one end is hanging over the side to get GPS signal – ship drove in figure of eight to improve GPS accuracy asap.
Launched AUV which dove first attempt – permitted to leave by AUV team.
Took one video: P560, R3226 VL3302 – NB due to (my) planning error we were at this site with the Chimera at the same time as the AUV (close call!), although the AUV was on the HiSAS line 70m away from the Chimera. I was warned by the AUV team 15mins in advance, but was given permission by them to continue after dive plan inspection showed it would be >50m away doing HiSAS coverage of the video line. They appreciated the HiPAP signal contact, but I will make efforts to avoid this happening again (!). Therefore we may see the Chimera on the HiSAS at this site.
Jossan started a påskekrim game onboard: pull a name from a pot (all ships crew included) – that person you have to “kill” by being alone with them in a room when they are not doing a work task/at their normal work station, you then collect their target name(s) and are told who is next to “kill”. Winner announced on Saturday (person with the most names) – good way to build morale and get to know the crew.
Had list of several more videos to achieve while AUV was in the water but before starting recording at the second site (P552), the chimera had an earthing fault (jordfeil) before start rec. and was brought back on deck (kl.13.30)
Ship electricians and instrument worked to fix it and succeeded but not before we had to leave the site
Moved to P550 to take a CTD (#258) for AUV MBES corrections (located at the far end of the AUV dive)
Returned to the AUV start position for AUV pick up kl. 16.15 – successful pick up Mission_55_20230405_3
Transit back to P550 to start video lines for rest of the night: P550 R3228 VL3304, P578 R3229 VL3305, P552 (where jordfeil happened earlier, reused numbers as no rec taken) R3227 VL3303, P586 R3230 VL3306, P582 R3222 VL3307 (wreck site were previous chimera feil had occurred – second VL at that site, previous was only still section), P561 R3231 VL3308, P575B R3232 VL3309, P568 R3233 VL3310, P581 R3234 VL3311, P549 R3235 VL3312
Figure 12 Inspecting HiSAS data from an earlier dive (clockwise from back: Tor Jan Meek, Terje Thorsnes, Kyrre Heldal Kartveit, and Shyam Chand)
Weather still too rough to make detour for AUV at Modiolus bed, so begin transit to Utsira (arrival kl.01.00)
Begin video stations – includes some sponge gardens (hard bottom Axinellid/ Oceanapia), an Isidella bed, and one unexpected shipwreck (possible U-boat): P118 R3255 VL3333, P128 R3256 VL3334, P41 R3257 VL3335, P158 R3258 VL3336 (wreck).
One station skipped as a large tanker ship was sitting on the spot (targeted station P157)
Figure 14 The team in the video room logging a video line crossing a wreck
continue video lines throughout the day, doing a circle outside of Stavanger fjords knowing that we will have to go in around 04.00 (the weather is worsening and the bridge wants 4hrs to drive to the declassified AUV site): P126 R3275 VL3353, P122 R3276 VL3354, P63 R3277 VL3355, P47 R3278 VL3356, P125 R3279 VL3357, P160 R3280 VL3358, P67 R3200 VL3359, P166 R3281 VL3360, P165 R3196 VL3361, P46 R3282 VL3362, P43 R3283 VL3363, P164 R3284 VL3364, P123 R3285 VL3365, P52 R3286 VL3366, P163 R3287 VL3367
Planned 13 possible video lines in the fjords near AUV areas as plans for when AUV is in the water/ during AUV restarts
drive in towards the Plan A AUV area for arrival by 08.00
Figure 16 A Stryphnus sponge covered in a yellow Hexadella sponge and associated epifauna, while sea pens and sea cucumbers sit in the background R3284 VL3364
Took CTD (#259) by AUV Plan A area (Horgefjorden) while adjusting AUV buoyancy in the water
Instructed to take a video line while doing and AUV restart, however whilst manoeuvring into position several floats marking fishing gear were spotted in the area – decided this was both dangerous for the Chimera and for the AUV as there is no information on extent or type of fishing and adjustments to the dive would be difficult/considerable and result in a much more unproductive dive given the positioning of the fishing floats: moved to Plan B area (Fognafjorden)
Took CTD (#260) to check for differences relating to the Plan A area
Launch AUV at Plan B area, successfully dove below the surface with a couple of seconds to spare, likely assisted by the wake of a passing hurtigbåt.
Aimed to do two planned VLs in the NE of the Plan B area, but fund a fishing gear float between them so had to replan
Planned 2 more VL in the middle of the AUV area (top of hill, AUV working around the bottom (FJ14, FJ15)
Did Chimera VL FJ14 R3288 VL3368 included stop to pass lost fishing gear
Picked up AUV: Mission_55_20230410_2
Did second planned Chimera VL while waiting for improvements in weather FJ15 R3289 VL3369
Planned and did a third Chimera VL while waiting FJ16 R3290 VL3370 – this one is 350m long to give the same line as the photo lines from the AUV for comparison. It is split into ab (normal Mareano sample ~225m) and c (the remainder) recordings. Again pause due to lost fishing gear.
Lene reported the lost fishing gear that we encountered on FJ14 and FJ16 (later examination of the AUV data shows this is one net spanning 450m in length)
Decided at dinner to stop adding extra video lines and now await a weather window – plan for possible departure at 20.00 but delayed until kl. 00.00
Transit to P130 to resume Mareano stations en route back towards Bergen starting kl.04.00 when conditions were finally good enough: P130 R3291 VL3371, P161 R3292 VL3372, P162 R3293 VL3373
Began packing away sampling equipment through the day
Continue with the final video lines throughout the day, ending at around 23.00: P49 R3294 VL3374, P171 R3295 VL3375, P106 R3296 VL3376, P176 R3297 VL3377, P132 R3298 VL3378, P121 R3299 VL3379, P51 R3300 VL3380, P110 R3301 VL3381.
Begin transit to Bergen arriving ~06.00
Demobilisation until ~15.00
Appendix 2 - AUV Dive Plans
Here are the dive plans for any AUV missions that collected data - not all were completed according to plan, but these are the plans that the AUV was asked to complete (sometimes internal errors resulted in data stopping being collected after e.g. a couple of hours but the AUV still followed the full route and reappeared where it was expected to).
Naming of Dives
Auv dives are assigned a name in the format:
Mission_<vehicle number>_<date: yyyymmdd>_<dive/restart number that day>
These are the completed dives from this cruise together with their planning name. The planning names generally used a format:
<Dive number when transferred to AUV computer for checks> <Area>_SubAreaNumber><letter denoting new iterations of that dive plan>
Mission Name
Planning Name
Area
1
Mission_55_20230401_6
Dive 1 Utsira_1a
Utsira
2
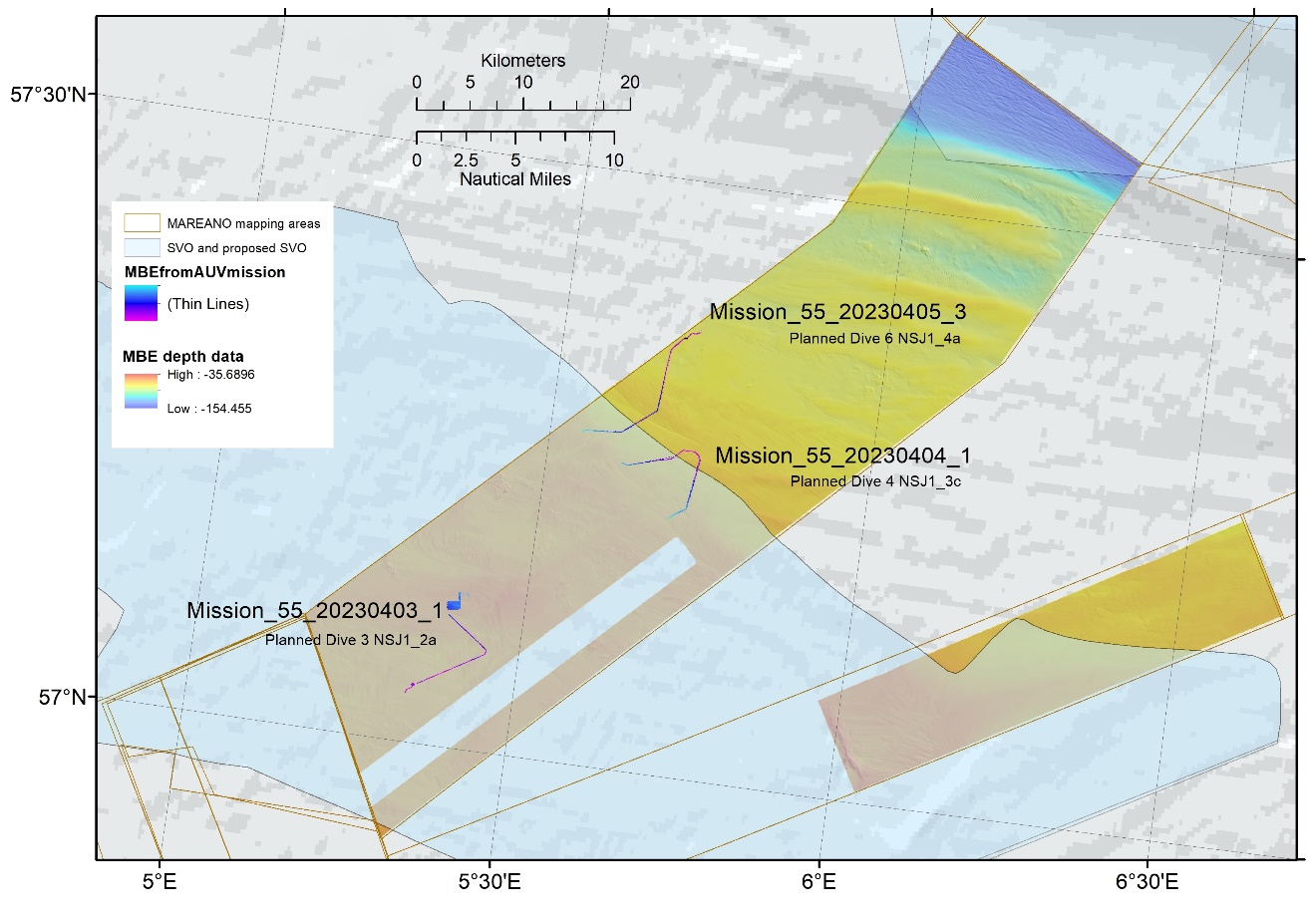
Mission_55_20230403_1
Dive 3 NSJ1_2a
NSJ-1
3
Mission_55_20230404_1
Dive 4 NSJ1_3c
NSJ-1
4
Mission_55_20230405_3
Dive 6 NSJ1_4a
NSJ-1
5
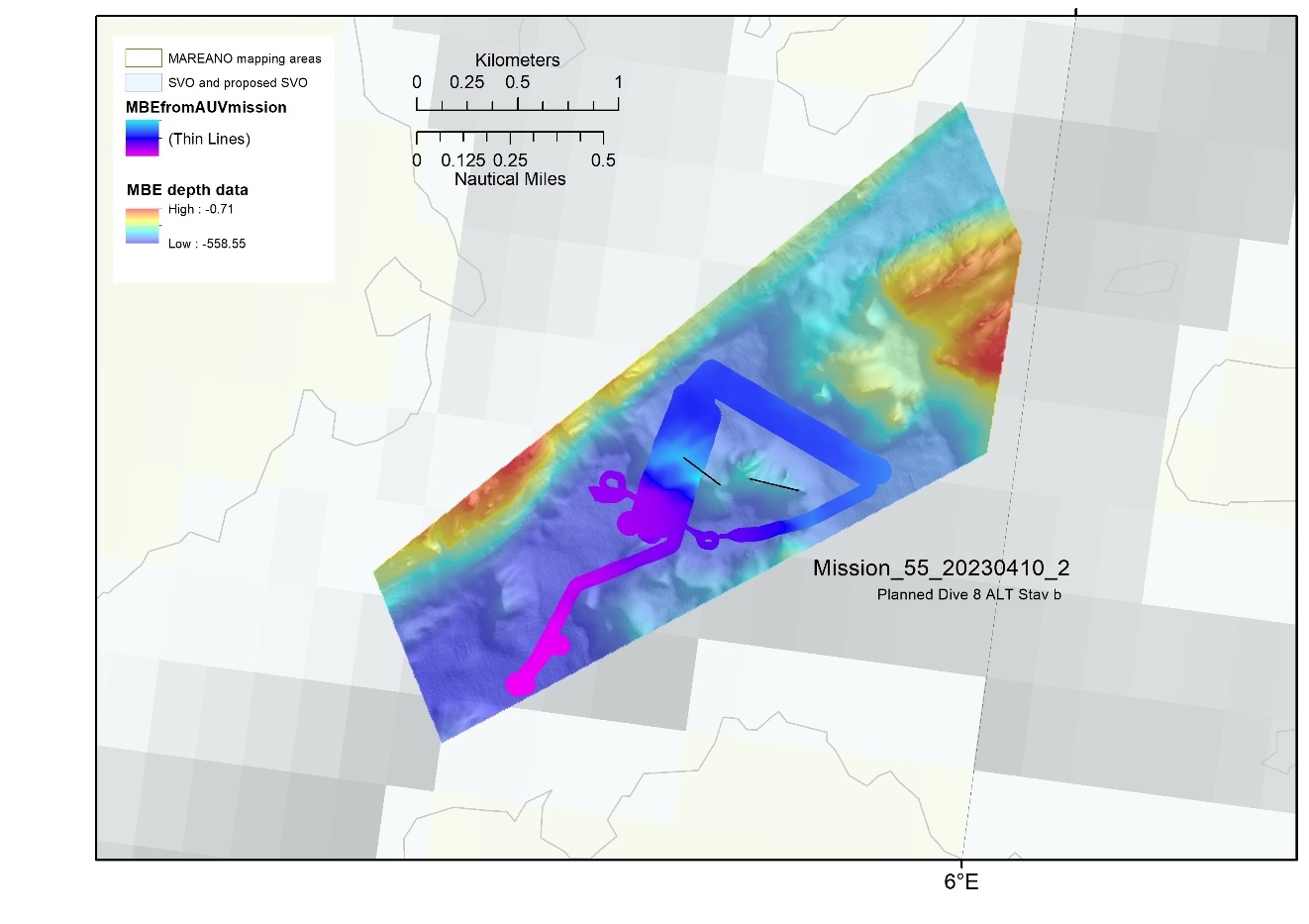
Mission_55_20230410_2
Dive8Alt Stav_b
Fognafjorden
Maps of AUV dive locations
The following overview maps show where the AUV dives took place. Dive plans follow in the next section and use both the mission number name (which is indicated in these maps) and the planning name for better orientation.
Figure 17 Location of 1st AUV dive (Mission_55_20230401_6) in Utsira area (enters Utsira North Havvind area and outside to the west. The whole dive is outside of 12nm to avoid classification of the seabed issues (FOH did not grant our applications to operate within 12nm in time).
Figure 18 The locations of the 2nd, 3rd, and 4th AUV dives (Mission_55_20230403_1, Mission_55_20230404_1, Mission_55_20230405_3) in the NSJ-1 area
Figure 19 The location of the 5th AUV dive (Mission_55_20230410_2) in Fognafjorden where FOH granted our applicaiton to declssify the seabed and operate within the marked area
AUV dive plans from Hugin OS
It is beneficial to have an overview of what the AUV dive plan was, and how the data was labelled, what was tested, etc. This section is included to help try and discern more of what the collected data holds.
In each section there is:
An overview image from the Hugin OS view of that dive (possibly with a couple of zooms if it helps),
A very brief text of what happened on the dive.
This is all acoustic data unless photo data are specifically mentioned.
Photolines usually are done at 3 or 4m height and any turns with steep angles must be done at 7m height as the vehicle dips when turning and we want to avoid emergency ascent measures.
HiSAS lines along video lines are offset to the side of the video line so that the video line runs through the HiSAS portion of the data (usually planned to be ~70m away from the video line), photo lines will follow the Video Line as preceisely as possible and are not offset from the video line.
A copy of the text file that forms the whole of the mission plan that is loaded into Hugin OS. This can be copied to a text file, saved with a .mp file extension, and loaded into Hugin OS in order to explore the dive in more detail.
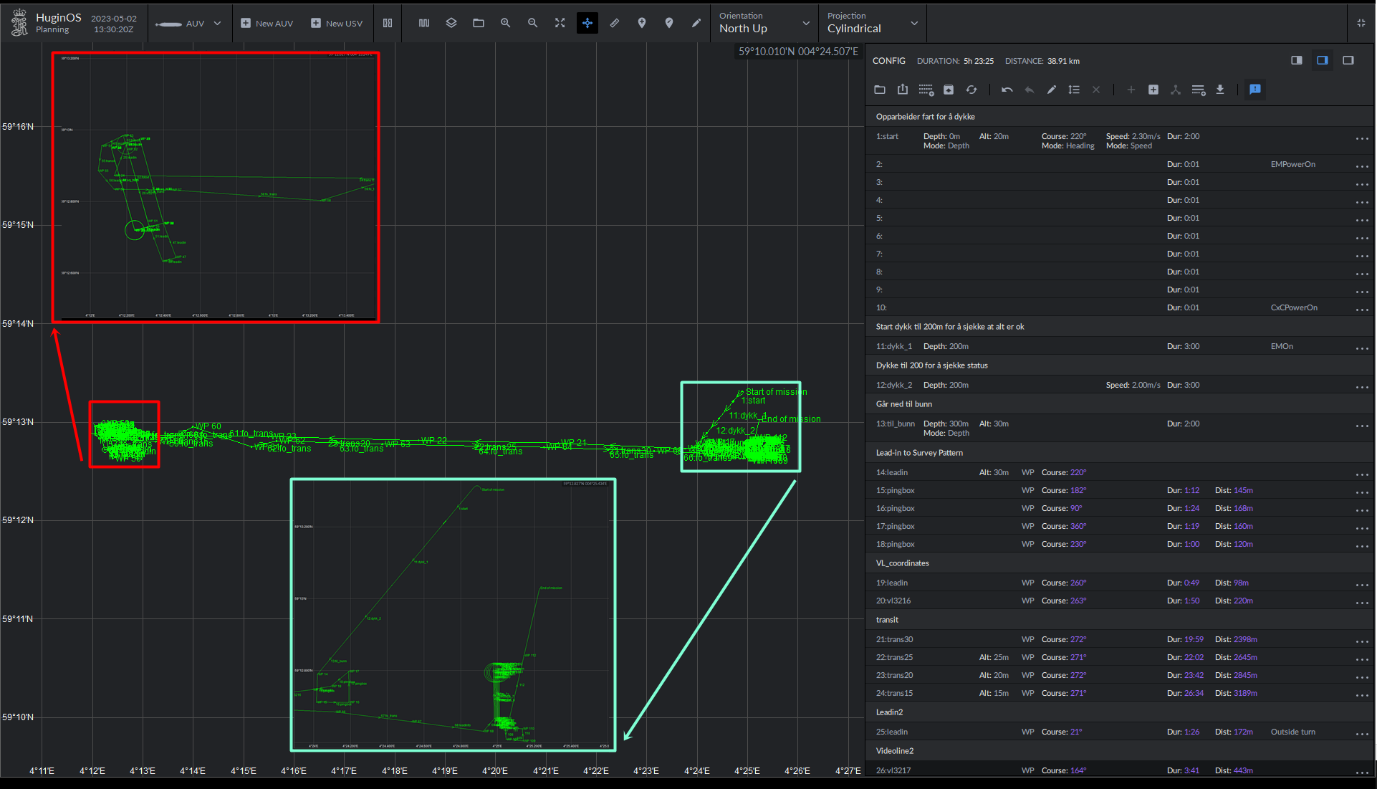
(Planned for) 5hrs 23mins, 38.91 km (have data from roughly the first third of this)
Text summary
Dive to bottom, do a pingbox (i.e. a chance for the ship to sit in middle and send a message with updated positioning to the AUV as AUV circles below, staying close to the ship – increases chance of succeeding with message sending).
Drive along VL3216 (acoustic data only at 30m height), transit west stepping down through different heights (30m, 25m, 20m, 15m), drive along VL3217 at 15m height.
(AFTER ROUGHLY THIS POINT, DATA WAS NOT COLLECTED DUE TO A FAULT ON THE VEHICLE DURING THE DIVE)
Do a hiSAS comparison box at different heights over the same piece of seafloor (15m, 20m, 25m, 30m, 35m), do photo collection along VL3217 (west to east at 3m height), do photo transect back from west to east along the full length of dive in the HiSAS data, pass the pingbox doing photos, do a photo patch at 4m height (mow the lawn style) over an iceberg ploughmark feature, pingbox again, before ascent.
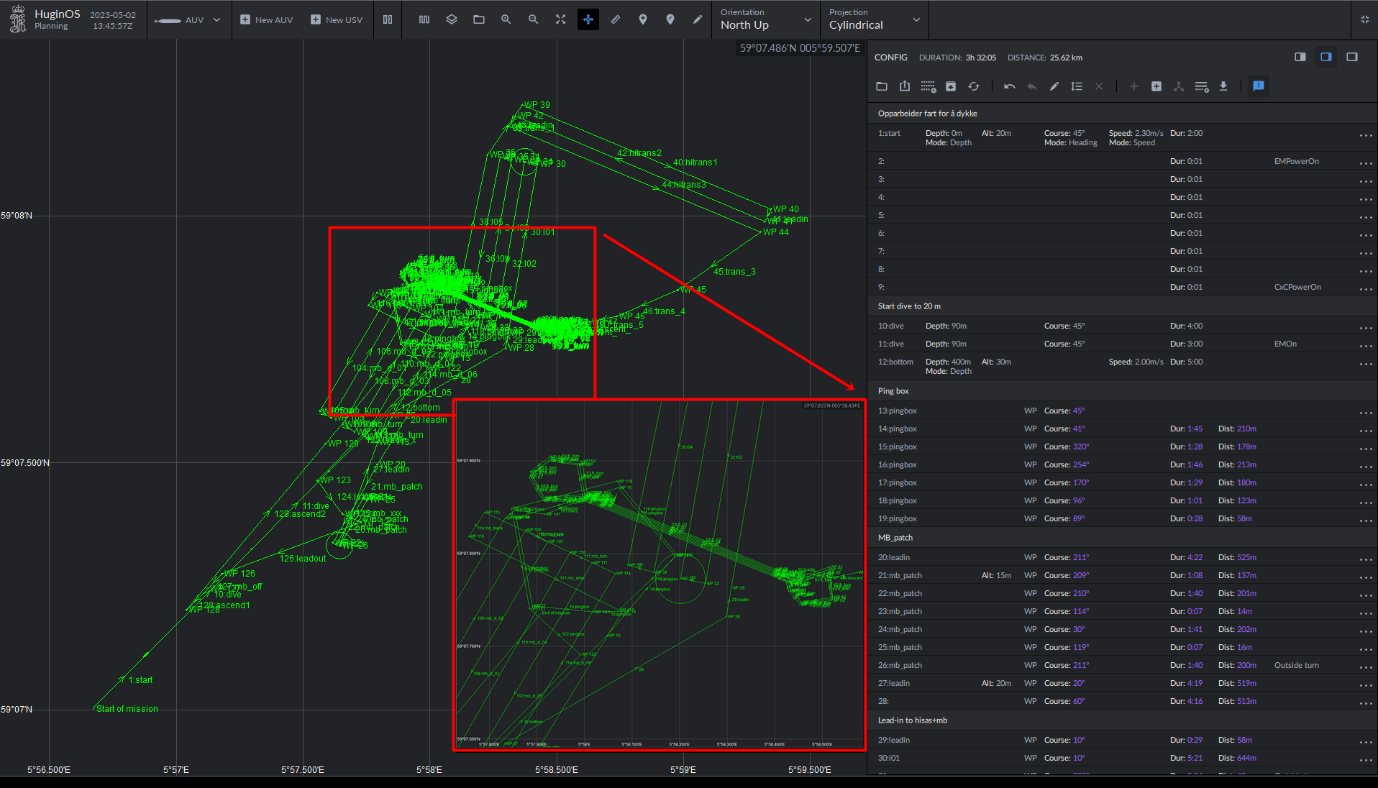
HuginOS mission plan
MP13
#
# Kongsberg Maritime AUV Mission Plan
# Saved 2023-04-01 16:23:44 by hugin
#
#:Tag Depth Alt DMo Latitude Longitude Course GMo Speed SMo Dur Dist Flags
#
# Opparbeider fart for å dykke
:start 0.0 20.0 D - - 220.0 H 2.30 S 120 - ETPowerOn
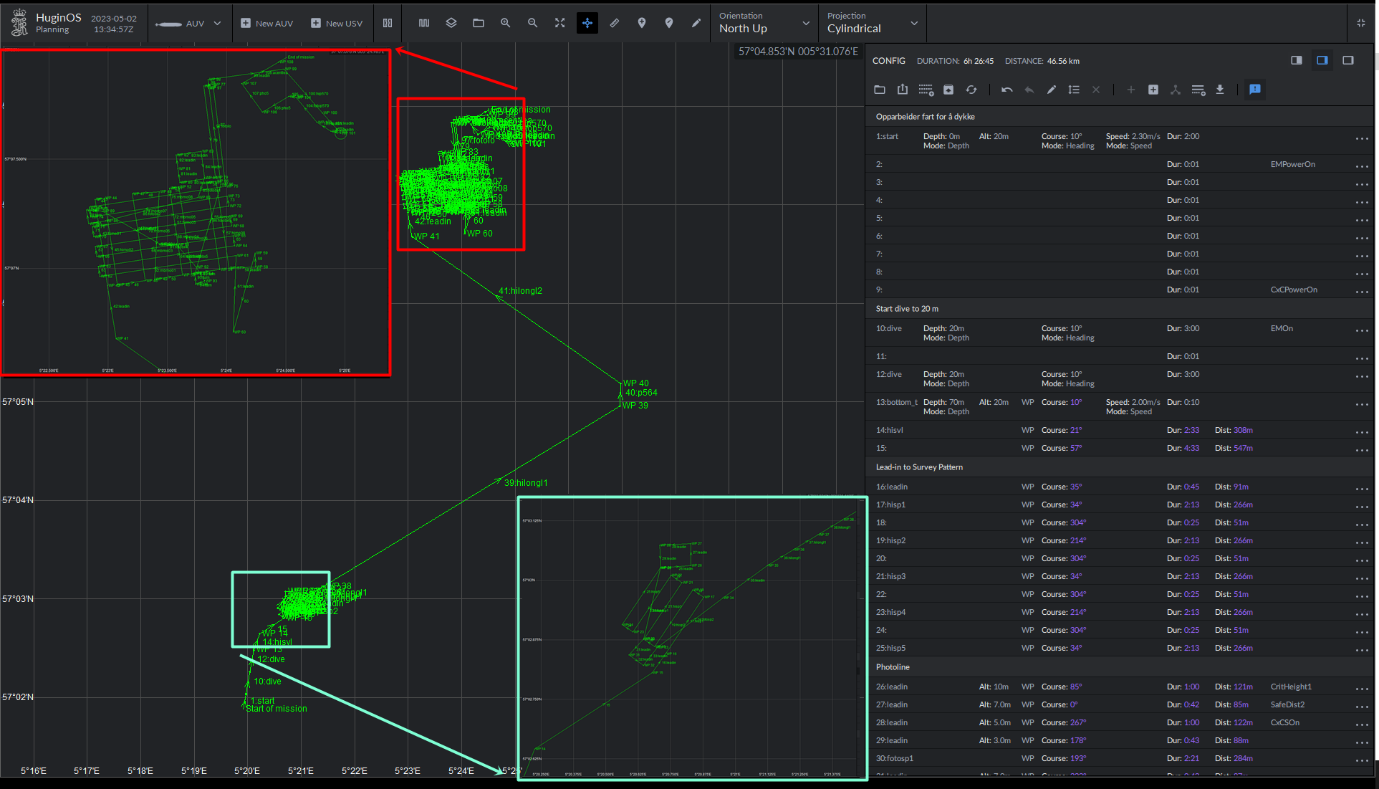
Descend, (no pingbox necessary as is shallow area and can detect bottom from launch), head NE at 20m altitude to area of one of the gravity corer proposed sites (GC4, with potential natural oil leakage), do acoustic patch over GC5 point area. Turn and descend to 3m and do 2 photo lines over the acoustic data.
Ascend to 20m altitude and transit to the NE to meat video line (planning ID P564, now VL 3284), do acoustic line over video line. Transit to NW to way point 41.
From waypoint 41 do an acoustic mow the lawn survey pattern patch over an interesting sand feature, first with a HiSAS mow the lawn pattern at 20m height (roughly north south), then with a multibeam mow the lawn pattern at a right angle to the hiSAS pattern (roughly east west) still at 20m height to waypoint 76.
From waypoint 76 the acoustics continue roughly Northwards to cross a sand ripple channel feature, then return parallel down to the NE corner of the survey pattern patch.
Descend to 3m and do photolines across the acoustic patch in a rough triangle (Westwards, SE with a kink, NE to top NE corner of survey pattern patch). Continue photoline roughly north across acoustics that cross the sand ripple channel to waypoint 98.
Return to 15m height and transit Eastwards to northern end of video line (with planned ID P570, now VL 3282) and run HiSAS along video line. Descend to 3m and do photo line over video line (P570, VL3282).
Ascend a little and do pingbox (after a long dive to check drift) before ascending to the surface.
Hugin OS mission plan
MP13
#
# Kongsberg Maritime AUV Mission Plan
# Saved 2023-04-03 12:24:56 by hugin
#
#:Tag Depth Alt DMo Latitude Longitude Course GMo Speed SMo Dur Dist Flags
#
# Opparbeider fart for å dykke
:start 0.0 20.0 D - - 010.0 H 2.30 S 120 - ETPowerOn
: = = = - - = = = = 1 - EMPowerOn
: = = = - - = = = = 1 - SASPowerOn
: = = = - - = = = = 1 - SASHighPower
: = = = - - = = = = 1 - SASMode1
: = = = - - = = = = 1 - DistTrigger
: = = = - - = = = = 1 - EM400Ext
: = = = - - = = = = 1 - ETOn
: = = = - - = = = = 1 - CxCPowerOn
# Start dive to 20 m
:dive 20.0 = D - - 010.0 H = = 180 - EMOn
: = = = - - = = = = 1 -
:dive 20.0 = D - - 010.0 H = = 180 -
:bottom_t 70.0 20.0 T 57:02.4909N 005:20.1150E (010) = 2.00 S 10 - SASOn
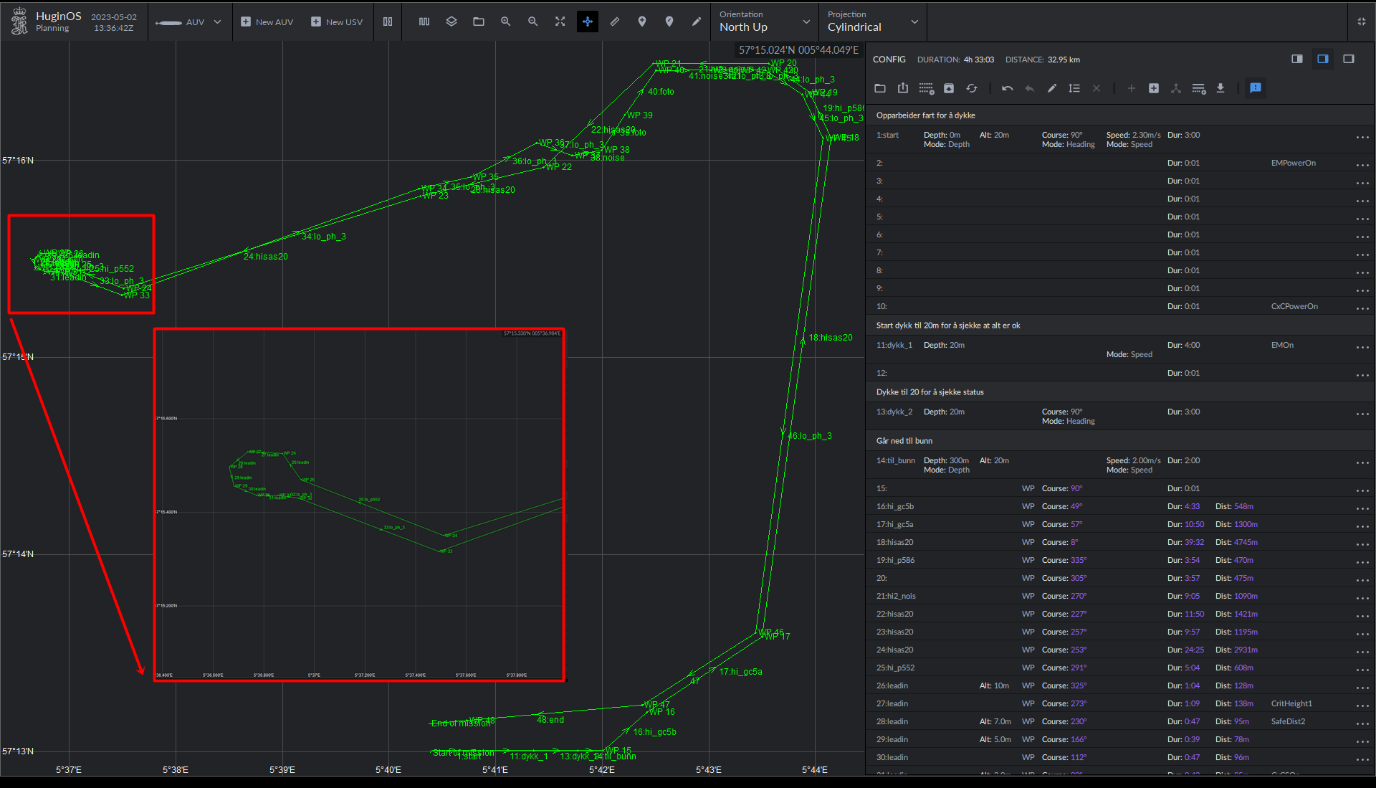
Descend close to gravity coring (GC) request sites (where it is possible there are natural leakages of oil). Start HiSAS lines at 20m over GC sites (GC5B then GC5A - sites that were added later in planning but NB are not located beside GC5), continue roughly northwards. HiSAS line over video line (planning ID P586, now VL3306). HiSAS covering Karverket flagged noise point in the north, transit towards SW covering another potential noise point in Hisas line 22. Cross over varying terrains, transit NW to cover video line (planned ID P552, now VL 3303) with HiSAS data.
Do turn to lower to 3m height and cover video line (P552, VL3303), varying terrains towards the NE, pass over noise point (line 38) that is in hisas line 22, transit to northernmost point (still taking pictures at 3m). Pass over other suspected noise point (noise3m1, hisas line “hi2_nois”).
(AT ROUGHLY THIS POINT THE AUV TOOK AN AVOIDANCE MEASURE AND ASCENDED ABOVE AN ALTITUDE WHERE THE BOTTOM IS VISIBLE, IT NEVER DESCENDED AGAIN TO THE PHOTO HEIGHT OF 3M – LEARNED TO REPEAT THE ALTITUDE COMMAND MORE OFTEN IN THE PLAN SO THAT THE AUV WILL TRY TO DESCEND AGAIN IF THERE HAD BEEN AN AVOIDANCE MEASURE – ALL PHOTOS AFTER THIS ARE OF THE WATER COLUMN)
Do photo line (intended to continue at 3m but instead was done much higher) towards the SE over video line (P586, VL3306), do photoline following HiSAS line back Southwards, do photo line over the hisas data where the GC points are found, ascend.
HuginOS mission plan
MP13
#
# Kongsberg Maritime AUV Mission Plan
# Saved 2023-04-04 14:31:18 by a37686
#
#:Tag Depth Alt DMo Latitude Longitude Course GMo Speed SMo Dur Dist Flags
#
# Opparbeider fart for å dykke
:start 0.0 20.0 D - - 090.0 H 2.30 S 180 - ETPowerOn
Descend to 20m altitude. Do hisas line over video line (VL3294), transit to next video line, do hisas over video line (VL3293), both of these include flagged kartverket noise points for checking. Transit past another noise point (in HiLo3). Turn roughly southwards and transit towards video line. Do hiSAS line over video line (planned ID P560, now VL3302). Transit SW to cover features of interest, transit west towards another video line, do hisas over video line (planned ID P550, now VL3304).
Descen to 3m to do photo line over video line (P550, VL3304), continue photolines along acoustic data to east, NE, then over video line (P560, VL3302). Continue roughly Northwards, ascend to 4m as mutibeam shows rockier landscape (from line labelled “foro1”). Do photolines in vicinity of noise points and over VL3293. Photoline transit to then along VL3294, descend to 3m to continue photoline over flatter terrain (folo4) until ascending to end the dive.
HuginOS mission plan
MP13
#
# Kongsberg Maritime AUV Mission Plan
# Saved 2023-04-05 07:10:22 by hugin
#
#:Tag Depth Alt DMo Latitude Longitude Course GMo Speed SMo Dur Dist Flags
#
# Opparbeider fart for å dykke
:start 0.0 20.0 D - - 220.0 H 2.30 S 120 - ETPowerOn
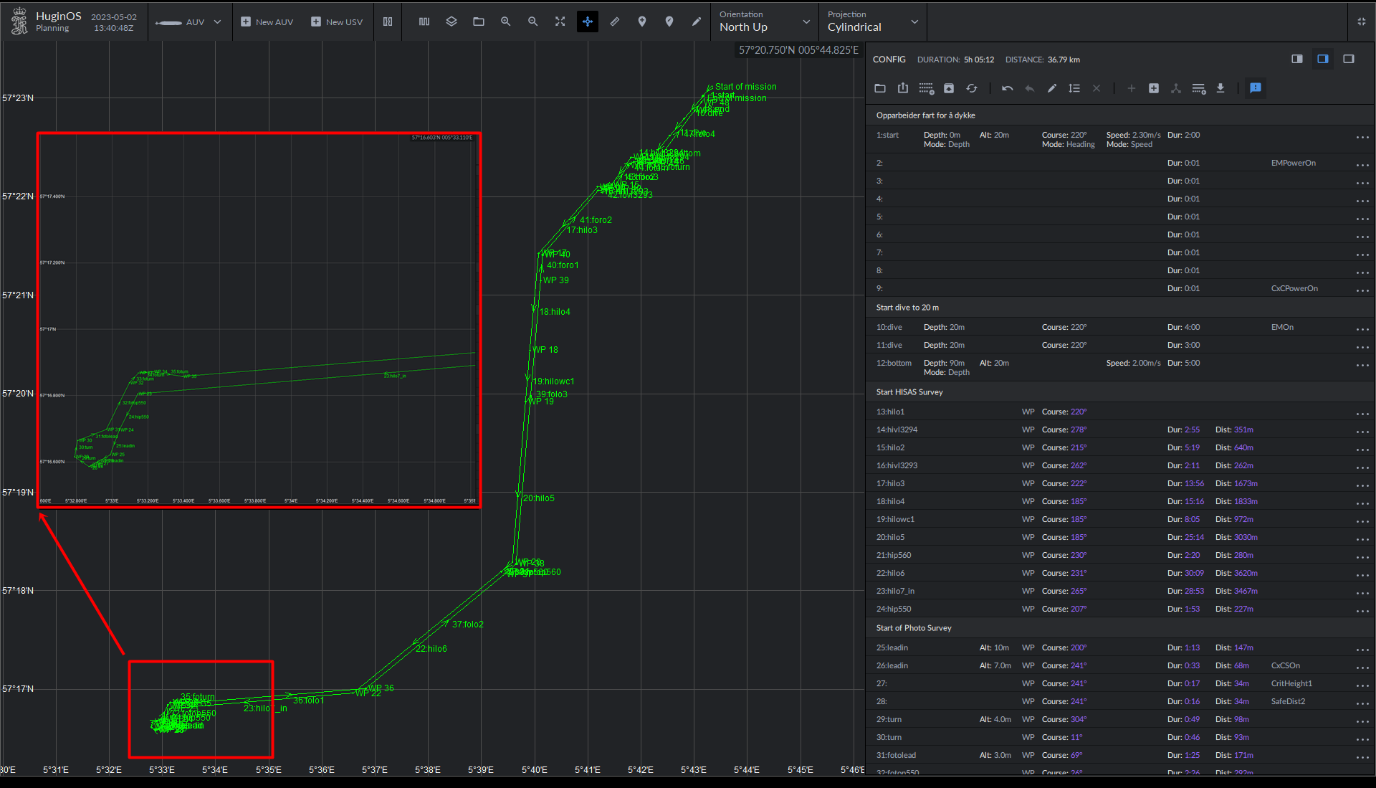
3hrs 32mins, 25.62km (but stopped collecting data after about 3hrs due to a fault on the vehicle during the dive)
Text Summary
Descend (east of anchor points to a fish farm), transit to centre of area to do a ping box (pentagonal) at 30m altitude. Transit to SW and descend to 15m to begin multibeam patch (over a small feature, the intention is to cross this patch again at the end to monitor drift).
Ascend to 20m while transiting towards hill feature and HiSAS & MBE patch crossing hill in roughly north south direciton (Waypoints 28-38). Transt to vally and do HiSAS/MBE patch there in roughly east west patterm.
Transit round the side of the hill feature following the deeper plan/valley and begin photo mosaic at 3m altitude that crosses lower edge of the hill HiSAS patch (later video line VL3370 overlaps this patch).
Transit to 20m altitude for large HiSAS patch in roughly SW/NE direction (waypoints 103-114) then do two crosslines in roughly NW/SE direction near top end of patch.
<NOTE THAT AGAIN AN INTERNAL FAULT RESULTED IN NO DATA BEING COLLECTED AT SOME POINT DURING THIS HISAS PATCH; NO FURTHER DATA WAS COLLECTED AFTER THIS>
Pentagonal pingbox, then return to multibeam patch over small feature at 15m altitude for crosscheck of drift before ascending.
HuginOS mission plan
MP13
#
# Kongsberg Maritime AUV Mission Plan
# Saved 2023-04-10 08:14:16 by hugin
#
#:Tag Depth Alt DMo Latitude Longitude Course GMo Speed SMo Dur Dist Flags
#
# Opparbeider fart for å dykke
:start 0.0 20.0 D - - 045.0 H 2.30 S 120 - ETPowerOn
As we saw last year on the “metodetokt”, the general quality of the MBE data is very good. There are a few outliers as can be expected but they are within +/- 10 cm and can easily be filtered out.
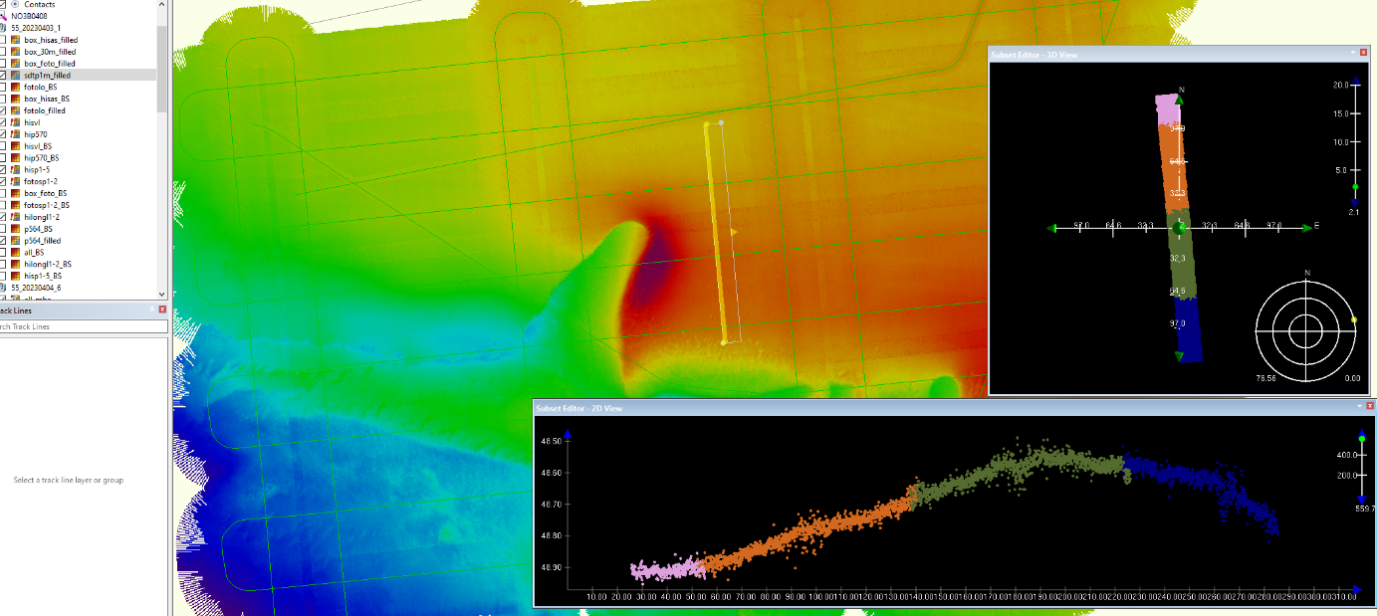
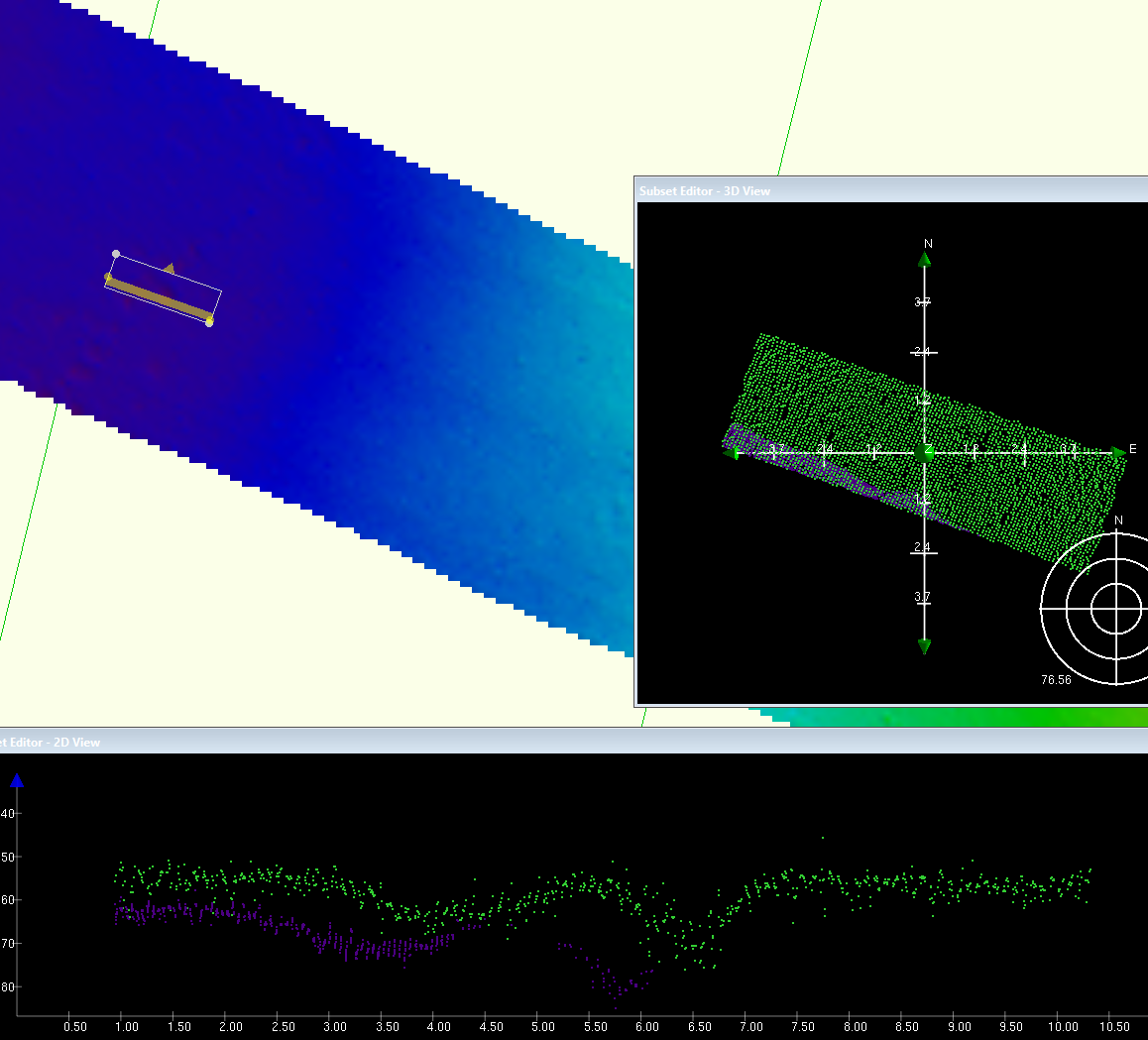
Example1:
These data from dive 55_20230403_1 have not been filtered except from trimming the outer beams to minimize the effect of slightly incorrect sound velocity. Each line has a different colour in the 2D and 3D window while surface in the window behind is coloured by depth.
Incorrect sound velocity:
Grey dots showing points from outer beams that have been filtered out.
In shallow areas like this it would be beneficial with more CTD profiles spread out in time and position to avoid or minimize problems with sound velocity.
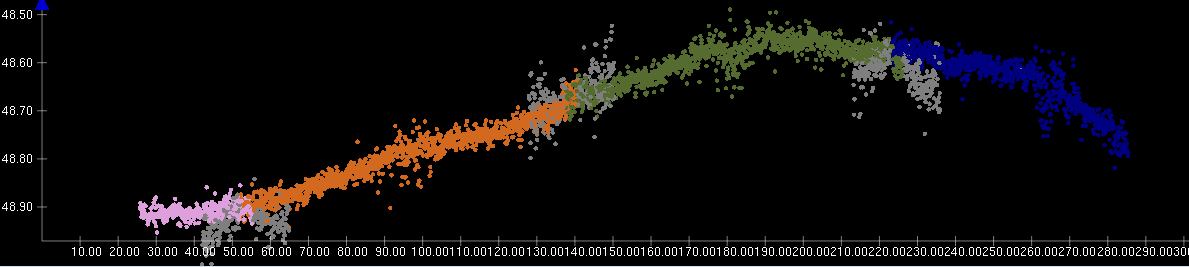
As we can see in example1 above, there is good correlation between lines surveyed within a short timeframe. The four lines in the 2D window were surveyed within a timeframe of 30 minutes.
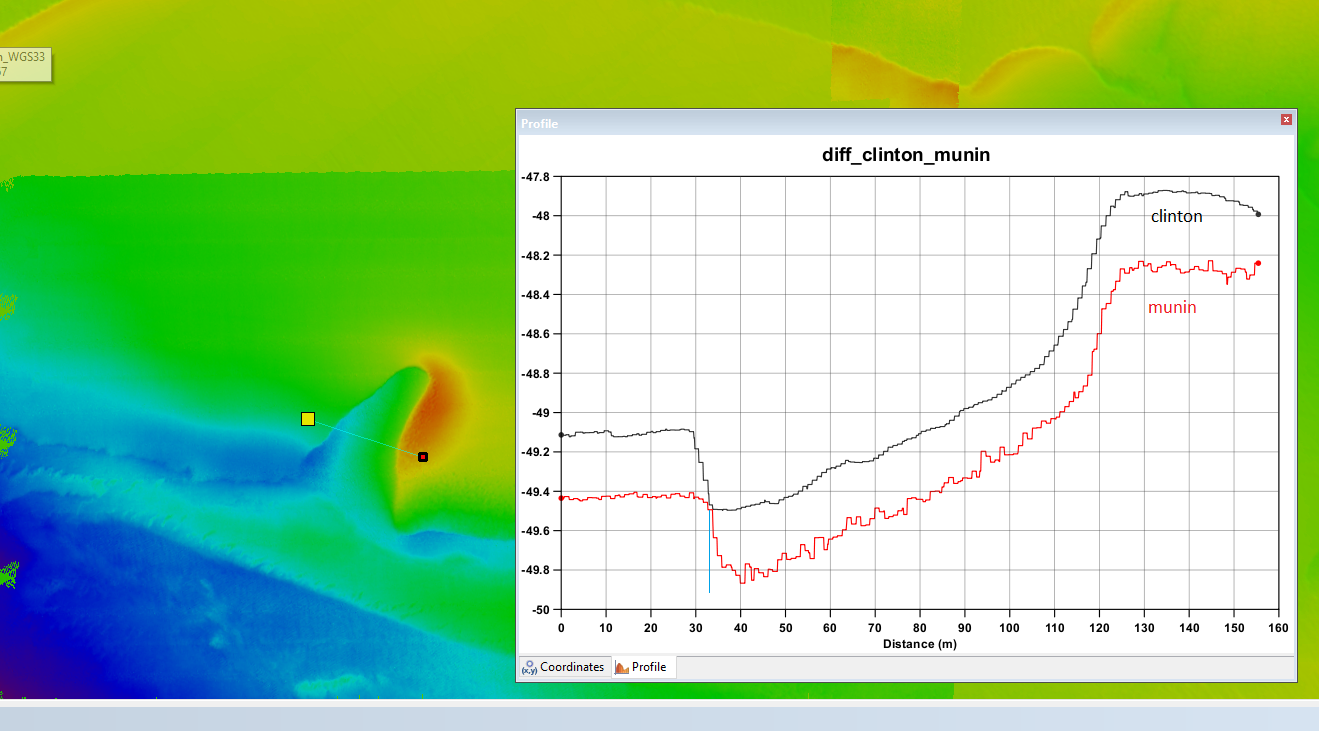
However, when comparing the lines going east-west to the lines going north-south, surveyed about one and a half hour later, we can see that there are misalignments between the lines. It is to some degree noticeable in the surface but is more evident when looking at the lines in the 2D window.
Example2:
We have also found some significant errors in absolute position when comparing data from “Munin” to data from surface vessels. The most concerning error was found on 55_20230401_6 where we could observe an error of around 30 meters.
Data from surface vessel behind and data from “Munin” on top.
When discussing this with Kongsberg they think it can be related to HiPap problems but that is not yet confirmed and needs looking into.
We also could observe smaller but still significant difference in other areas too as shown below
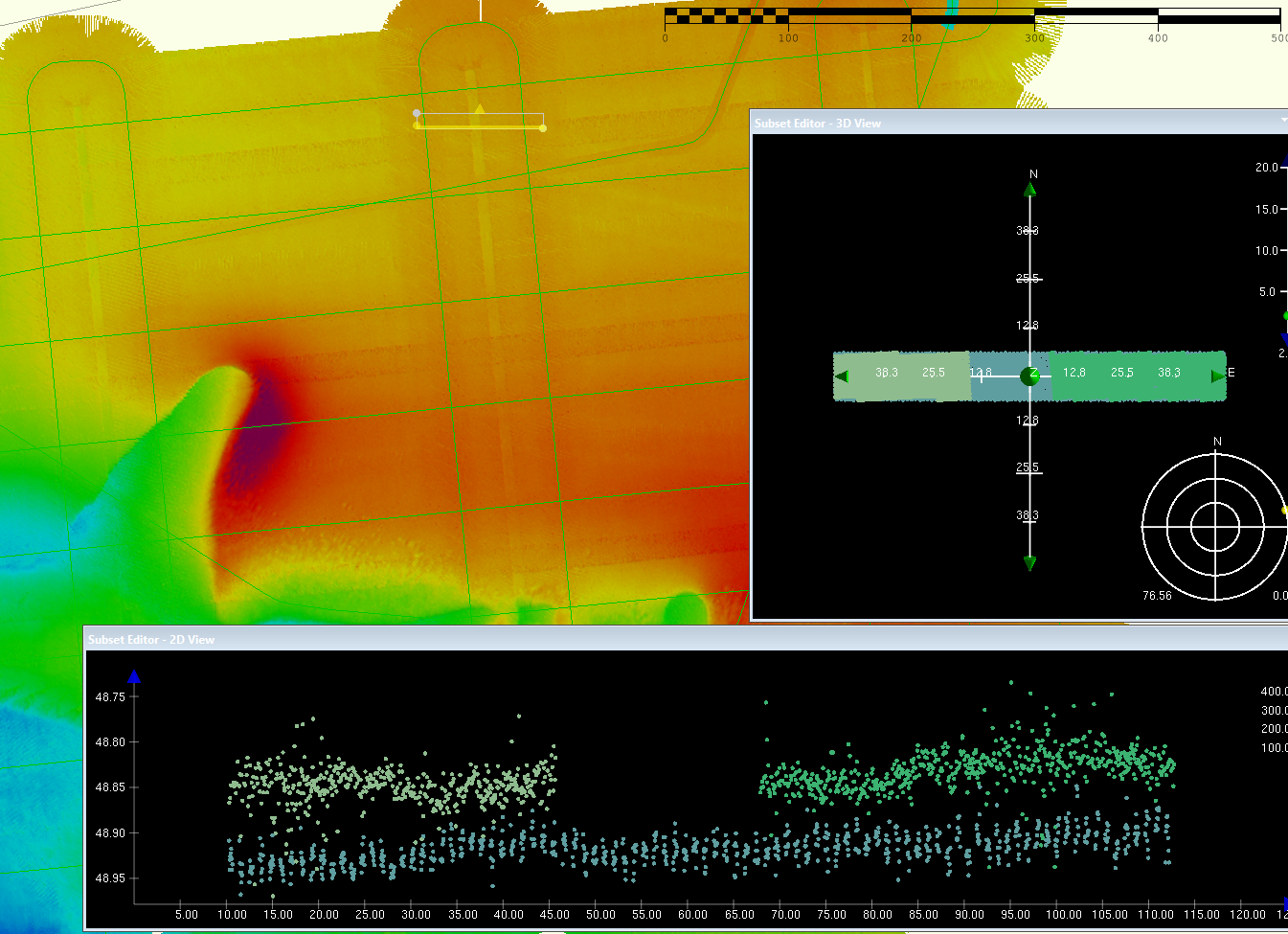
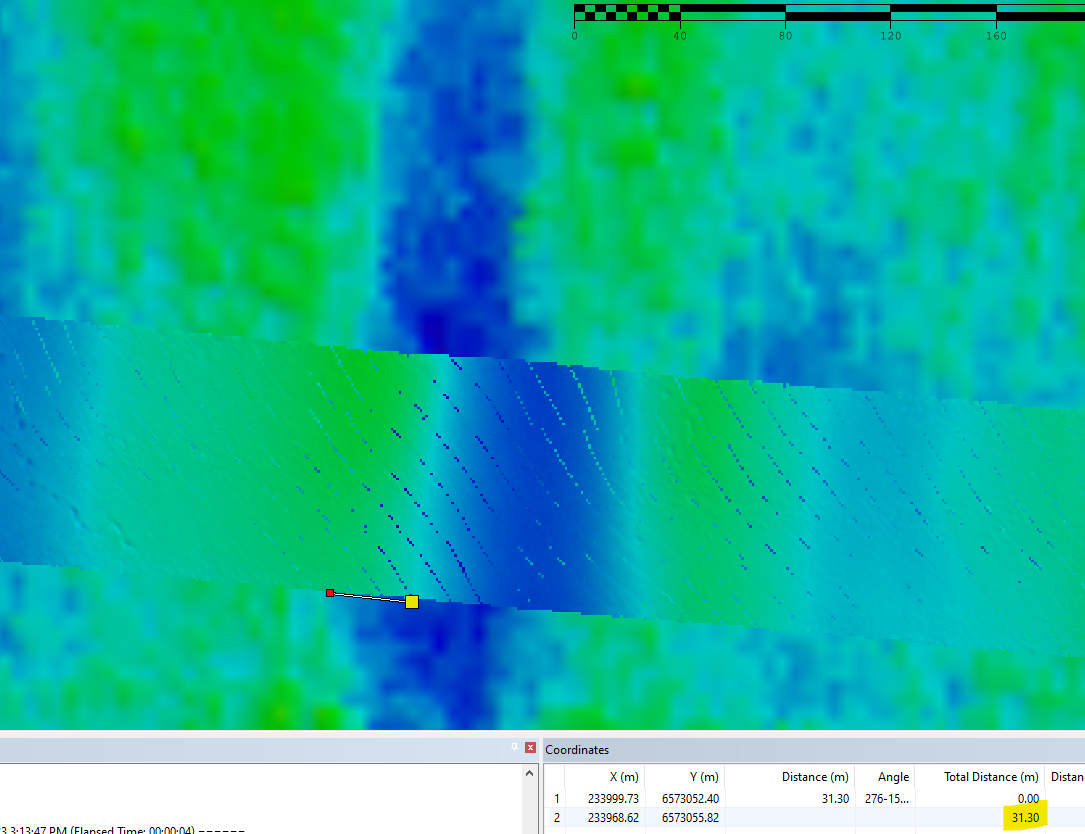
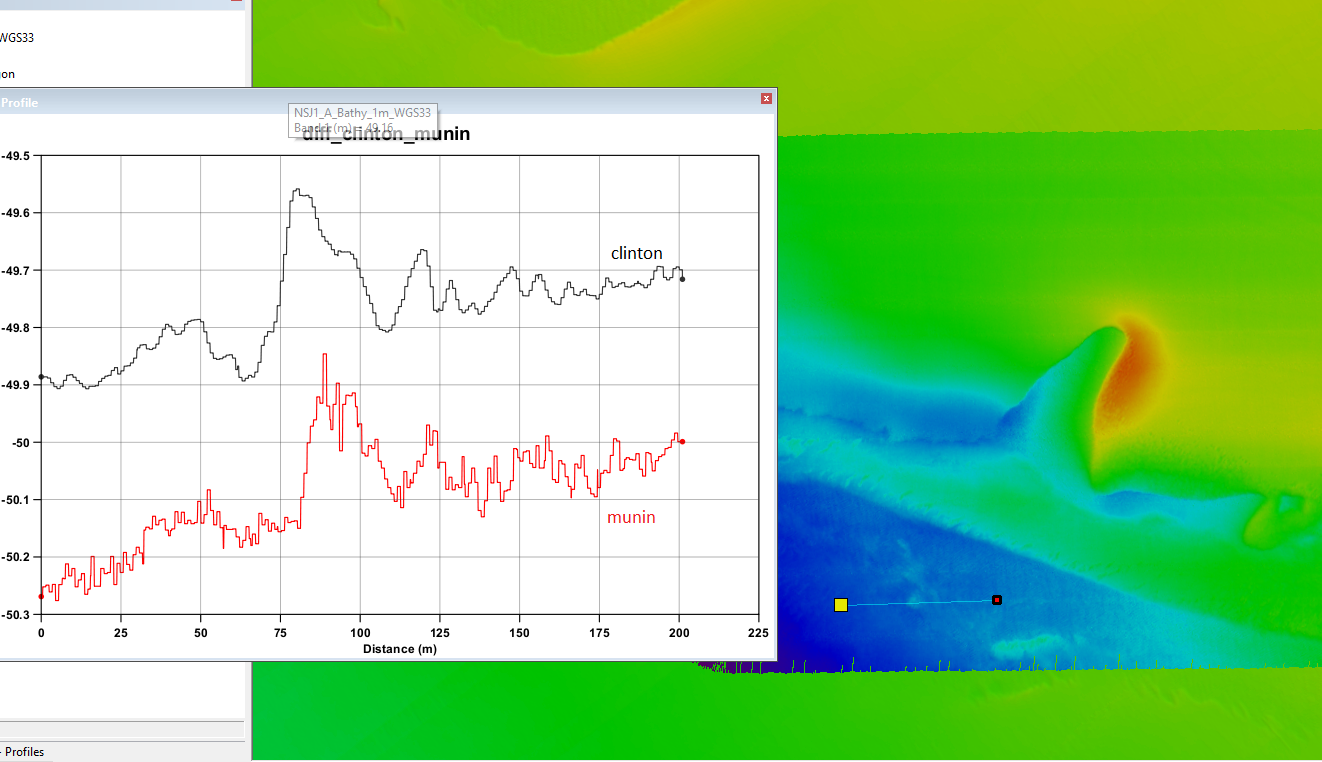
There were also some problems with position errors between adjacent surveylines as shown below in an example from 55_20230410_2.
These were lines run 25 minutes apart as part of a photo mission. They were short lines about 6-7 minutes long with 180 degree turns between. According to Kongsberg this is optimal for minimizing the drift in navigation but still we can observe a drift around one meter in position and 10 cm in depth in less than 30 minutes.